TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024032045
公報種別
公開特許公報(A)
公開日
2024-03-12
出願番号
2022135477
出願日
2022-08-29
発明の名称
アクセル装置
出願人
株式会社デンソー
代理人
弁理士法人服部国際特許事務所
主分類
F02D
9/02 20060101AFI20240305BHJP(燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備)
要約
【課題】反力を適切に付与可能なアクセル装置を提供する。
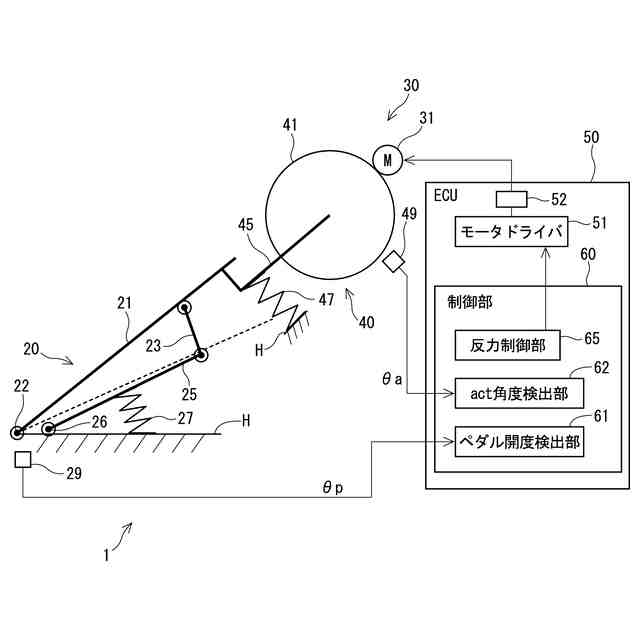
【解決手段】アクセル装置1は、ペダルレバー20と、モータ31と、動力伝達機構40と、制御部60と、を備える。ペダルレバー20は、踏み込みに応じて動作可能である。モータ31は、通電により駆動力を発生させる。動力伝達機構40は、モータ31の駆動力をペダルレバー20に伝達して、ペダルレバー20の踏込方向とは反対方向の力である反力を付与する。制御部60は、モータ31を制御することで、ペダルレバー20に付与する反力を制御する反力制御部65を有する。反力制御部65は、反力付与開始から反力保持時間Xhの間、初期反力F0を保持し、反力保持時間Xhが経過した後、時間関数にて反力を減少させる反力減少制御を行う。
【選択図】 図1
特許請求の範囲
【請求項1】
踏み込みに応じて動作可能であるペダルレバー(20)と、
通電により駆動力を発生させる駆動源(31)と、
前記駆動源の駆動力を前記ペダルレバーに伝達して前記ペダルレバーの踏込方向とは反対方向の力である反力を付与する動力伝達機構(40)と、
前記駆動源を制御することで、前記ペダルレバーに付与する反力を制御する反力制御部(65)を有する制御部(60)と、
を備え、
前記反力制御部は、反力付与開始から反力保持時間の間、初期反力を保持し、前記反力保持時間が経過した後、時間関数にて反力を減少させる反力減少制御を行うアクセル装置。
続きを表示(約 270 文字)
【請求項2】
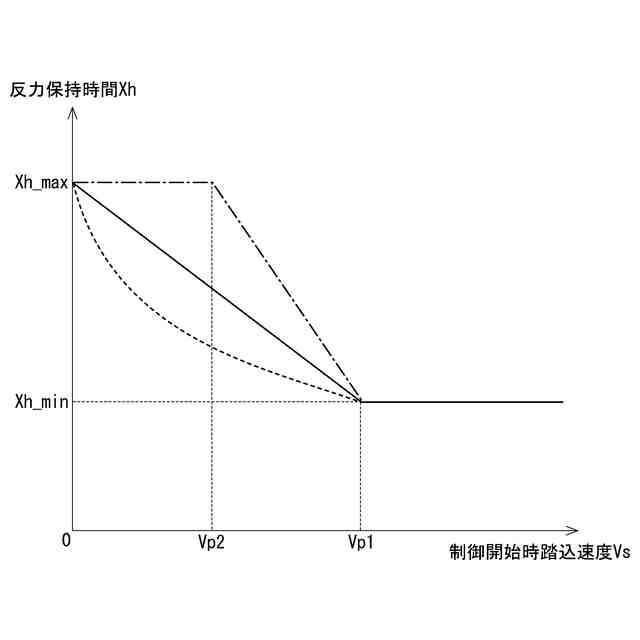
前記反力制御部は、反力付与開始時の前記ペダルレバーの踏込速度に基づき、前記反力保持時間を設定する請求項1に記載のアクセル装置。
【請求項3】
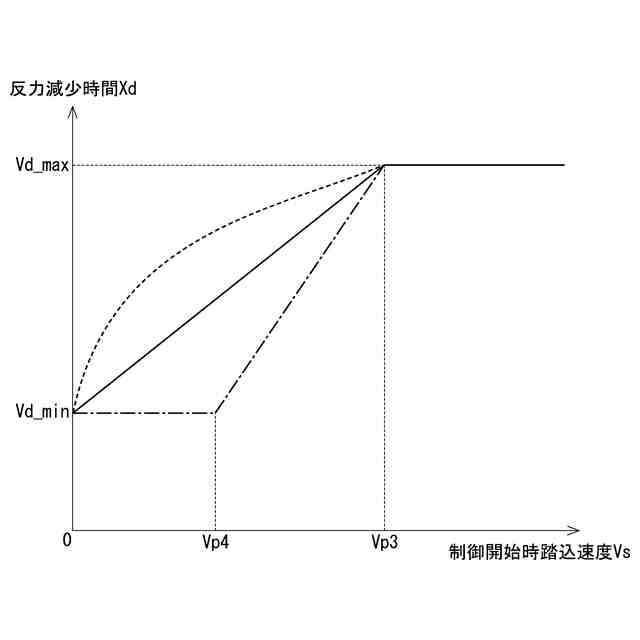
前記反力制御部は、反力付与開始時の前記ペダルレバーの踏込速度に基づき、前記反力減少制御を行う反力減少時間を設定する請求項1または2に記載のアクセル装置。
【請求項4】
前記反力制御部は、前記反力減少制御において、前記駆動源の逆起電力に応じ、電流フィードバック制御における制御定数を定常時と異なる値に切り替える請求項1に記載のアクセル装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクセル装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、アクセルペダルに対する反力を制御する反力装置が知られている。例えば特許文献1では、踏込速度が加速意図境界閾値を上回るとき反力を減少させ、踏込速度が加速意図境界閾値を下回るとき反力を維持する。
【先行技術文献】
【特許文献】
【0003】
特許第4747206号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、緩やかな加速と判定された場合、反力が維持される。そのため、運転者が加速意図により、緩やかな踏込速度でペダルを踏み込み続けようとする場合、反力が維持されるためペダルが踏み込みにくくなり、ペダルの操作性が悪化する虞がある。
【0005】
本発明は、上述の課題に鑑みてなされたものであり、その目的は、反力を適切に付与可能なアクセル装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明のアクセル装置は、ペダルレバー(20)と、駆動源(31)と、動力伝達機構(40)と、制御部(60)と、を備える。ペダルレバーは、踏み込みに応じて動作可能である。駆動源は、通電により駆動力を発生させる。動力伝達機構は、駆動源の駆動力をペダルレバーに伝達してペダルレバーの踏込方向とは反対方向の力である反力を付与する。制御部は、駆動源を制御することで、ペダルレバーに付与する反力を制御する。反力制御部は、反力付与開始から反力保持時間の間、初期反力を保持し、反力保持時間が経過した後、時間関数にて反力を減少させる反力減少制御を行う。これにより、反力を適切に付与することができる。
【図面の簡単な説明】
【0007】
第1実施形態によるアクセル装置を示す模式図である。
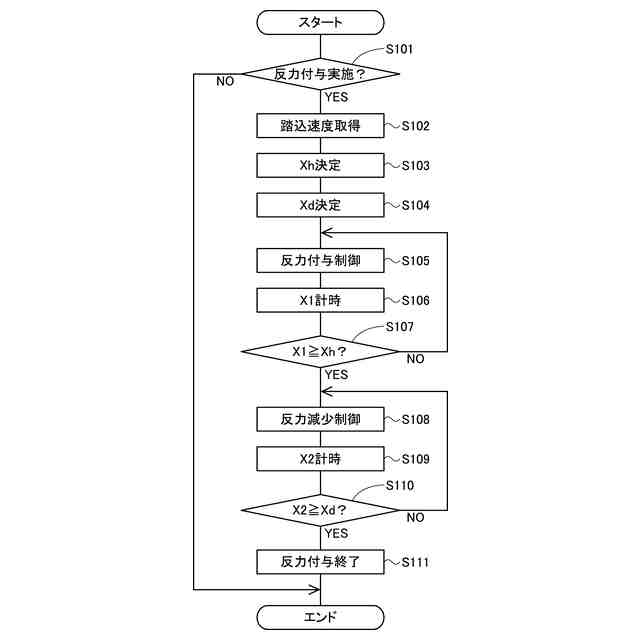
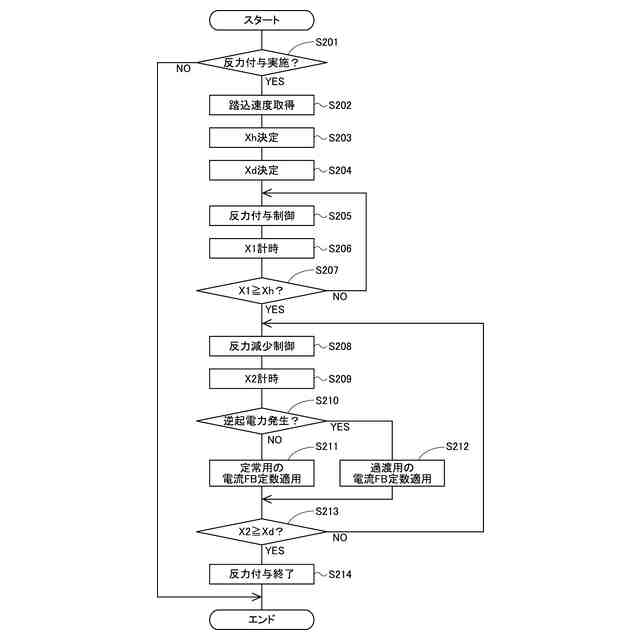
第1実施形態による反力付与制御を説明するフローチャートである。
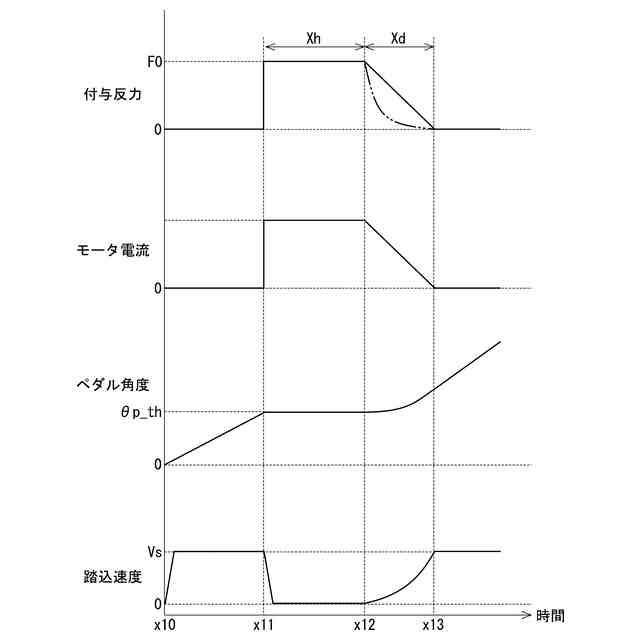
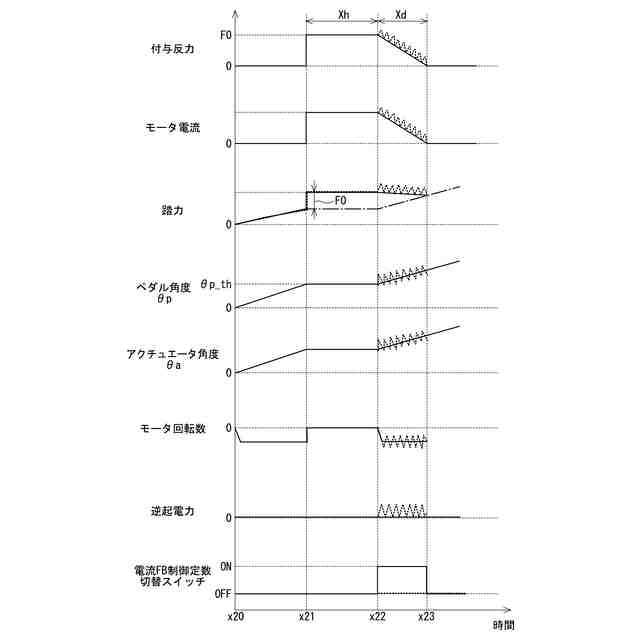
第1実施形態による反力付与制御を説明するタイムチャートである。
第1実施形態による反力保持時間の設定を説明する説明図である。
第1実施形態による反力減少時間の設定を説明する説明図である。
第2実施形態による反力付与制御を説明するフローチャートである。
第2実施形態による反力付与制御を説明するタイムチャートである。
【発明を実施するための形態】
【0008】
(第1実施形態)
以下、本発明によるアクセル装置を図面に基づいて説明する。以下、複数の実施形態において、実質的に同一の構成には同一の符号を付して説明を省略する。第1実施形態を図1~図5に基づいて説明する。
【0009】
図1に示すように、アクセル装置1は、ペダルレバー20、モータ31、動力伝達機構40、および、ECU50等を備える。
【0010】
ペダルレバー20は、パッド21、アーム23、および、ペダル25を有し、ドライバの踏込操作等により一体に駆動される。パッド21は、ドライバにより踏込操作可能に設けられる。パッド21は、ハウジングHに設けられる支点部材22により回転可能に支持される。図1では、パッド21がハウジングHの一面に沿う方向に延びて設けられる、いわゆる床置き型(オルガン型)を示しているが、吊り下げ型(ペンダント型)であってもよい。本実施形態では、ペダルハウジングやモータハウジング等、モータ31の駆動およびペダルレバー20の踏込操作等により駆動されない筐体部分を、まとめて「ハウジングH」とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ