TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023079152
公報種別
公開特許公報(A)
公開日
2023-06-07
出願番号
2022108943
出願日
2022-07-06
発明の名称
経路生成方法、経路生成システム、及び経路生成プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/02 20200101AFI20230531BHJP(制御;調整)
要約
【課題】作業車両を複数の領域間を自動走行させることが可能な経路生成方法、経路生成システム、及び経路生成プログラムを提供する。
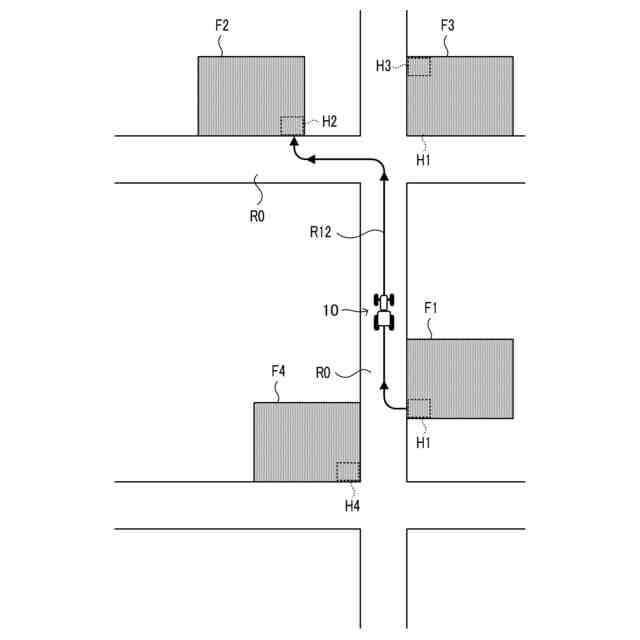
【解決手段】受付処理部212は、オペレータの走行操作を受け付ける。取得処理部213は、前記走行操作に基づいて圃場F1と圃場F2とを接続する道路R0を走行する作業車両10の位置情報を取得する。生成処理部214は、前記位置情報に基づいて、作業車両10を圃場F1と圃場F2との間を自動走行させる圃場間経路R12を生成する。
【選択図】図6A
特許請求の範囲
【請求項1】
ユーザーの走行操作を受け付けることと、
前記走行操作に基づいて第1領域と第2領域とを接続する接続路を走行する作業車両の位置情報を取得することと、
前記位置情報に基づいて、前記作業車両を前記第1領域と前記第2領域との間を自動走行させる領域間経路を生成することと、
を実行する経路生成方法。
続きを表示(約 1,200 文字)
【請求項2】
前記作業車両が前記第1領域内の第1所定領域に位置した状態で前記ユーザーから前記走行操作を開始する操作を受け付けた場合に、前記領域間経路の一端位置である第1端部位置を設定し、
前記作業車両が前記第2領域内の第2所定領域に位置した状態で前記ユーザーから前記走行操作を終了する操作を受け付けた場合に、前記領域間経路の他端位置である第2端部位置を設定し、
前記第1端部位置及び前記第2端部位置を接続する前記領域間経路を生成する、
請求項1に記載の経路生成方法。
【請求項3】
前記第1所定領域は、前記作業車両が前記第1領域に出入りするための出入口であり、
前記第2所定領域は、前記作業車両が前記第2領域に出入りするための出入口である、
請求項2に記載の経路生成方法。
【請求項4】
前記第1領域には、前記作業車両を自動走行させる第1作業経路が設定されており、
前記第2領域には、前記作業車両を自動走行させる第2作業経路が設定されており、
前記第1作業経路の開始位置又は終了位置と前記第1端部位置とを接続する第1補間経路と、前記第2作業経路の開始位置又は終了位置と前記第2端部位置とを接続する第2補間経路とを生成する、
請求項2又は3に記載の経路生成方法。
【請求項5】
前記ユーザーから前記第1領域及び前記第2領域を選択する操作を受け付けた場合に、前記走行操作を支援するための情報として、前記第1領域と前記第2領域とを接続する案内経路を操作端末に表示させる、
請求項1に記載の経路生成方法。
【請求項6】
生成された前記領域間経路を登録するか否かを前記ユーザーに通知し、
前記ユーザーから前記領域間経路を登録する指示を取得した場合に、前記領域間経路を前記第1領域及び前記第2領域に関連付けて登録する、
請求項1に記載の経路生成方法。
【請求項7】
前記領域間経路の少なくとも一部を利用して、他の複数の領域間を接続する領域間経路を生成する、
請求項1に記載の経路生成方法。
【請求項8】
前記第1領域及び前記第2領域は、圃場、前記作業車両に補給物を補給する補給領域、前記作業車両から排出物を排出する排出領域、又は、前記作業車両の保管領域である、
請求項1に記載の経路生成方法。
【請求項9】
前記第1領域及び前記第2領域のそれぞれが圃場である場合に、前記作業車両を、前記第1領域内を自動走行させ、その後に前記第1領域から前記第2領域まで前記領域間経路を自動走行させ、その後に前記第2領域内を自動走行させる、
請求項1に記載の経路生成方法。
【請求項10】
前記位置情報が示す位置を結ぶ直線及び曲線に基づいて前記領域間経路を生成する、
請求項1に記載の経路生成方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を自動走行させる経路を生成する経路生成方法、経路生成システム、及び経路生成プログラムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
近年、農業機械の自動化技術の進歩により、圃場内を自動走行しながら作業を行う作業車両が導入されている。例えば、前記作業車両は、測位システムを利用して作業車両の位置情報を取得する測位ユニットを備え、圃場に対して予め設定された目標経路に従って自動走行を行う(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-166981号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業車両は一つの圃場で作業を行う場合と複数の圃場で作業を行う場合とがある。作業車両が複数の圃場で作業を行う場合には、作業車両は一の圃場で作業を終了した後、農道等を走行して次の圃場に移動し、当該圃場で作業を行う。このように作業車両に複数の圃場で作業させるためには、作業車両を複数の圃場間を自動走行させる必要がある。しかし、従来の技術では、作業車両を一つの圃場内を自動走行させることは可能であっても、複数の圃場間を自動走行させることは困難である。
【0005】
本発明の目的は、作業車両を複数の領域間を自動走行させることが可能な経路生成方法、経路生成システム、及び経路生成プログラムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る経路生成方法は、ユーザーの走行操作を受け付けることと、前記走行操作に基づいて第1領域と第2領域とを接続する接続路を走行する作業車両の位置情報を取得することと、前記位置情報に基づいて、前記作業車両を前記第1領域と前記第2領域との間を自動走行させる領域間経路を生成することと、を実行する方法である。
【0007】
本発明に係る経路生成システムは、受付処理部と取得処理部と生成処理部とを備えるシステムである。前記受付処理部は、ユーザーの走行操作を受け付ける。前記取得処理部は、前記走行操作に基づいて第1領域と第2領域とを接続する接続路を走行する作業車両の位置情報を取得する。前記生成処理部は、前記位置情報に基づいて、前記作業車両を前記第1領域と前記第2領域との間を自動走行させる領域間経路を生成する。
【0008】
本発明に係る経路生成プログラムは、ユーザーの走行操作を受け付けることと、前記走行操作に基づいて第1領域と第2領域とを接続する接続路を走行する作業車両の位置情報を取得することと、前記位置情報に基づいて、前記作業車両を前記第1領域と前記第2領域との間を自動走行させる領域間経路を生成することと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0009】
本発明によれば、作業車両を複数の領域間を自動走行させることが可能な経路生成方法、経路生成システム、及び経路生成プログラムを提供することができる。
【図面の簡単な説明】
【0010】
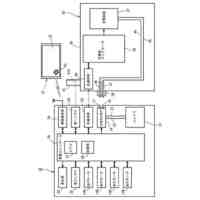
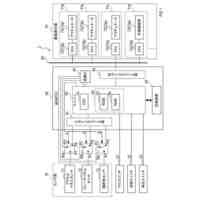
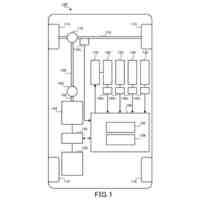
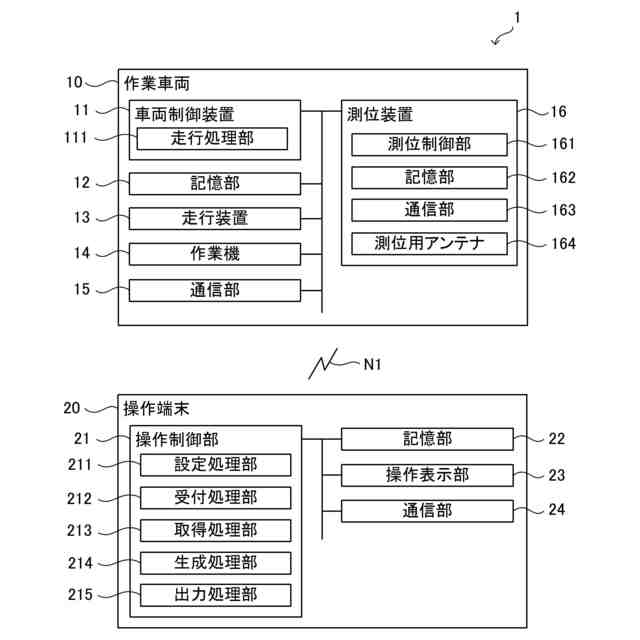
図1は、本発明の実施形態に係る自動走行システムの構成を示すブロック図である。
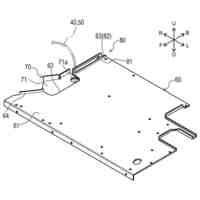
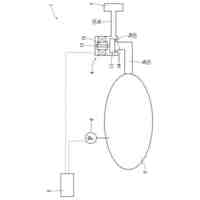
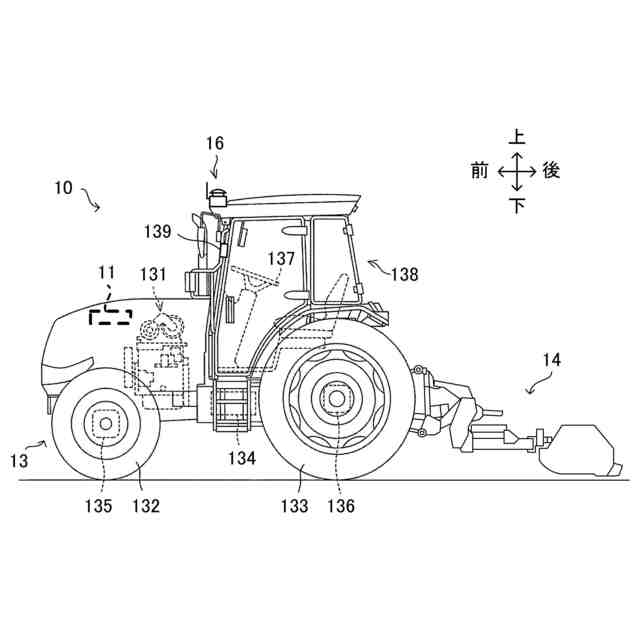
図2は、本発明の実施形態に係る作業車両の一例を示す外観図である。
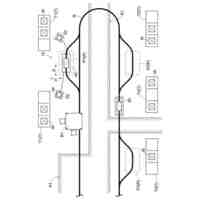
図3は、本発明の実施形態に係る作業車両の圃場間経路の一例を示す図である。
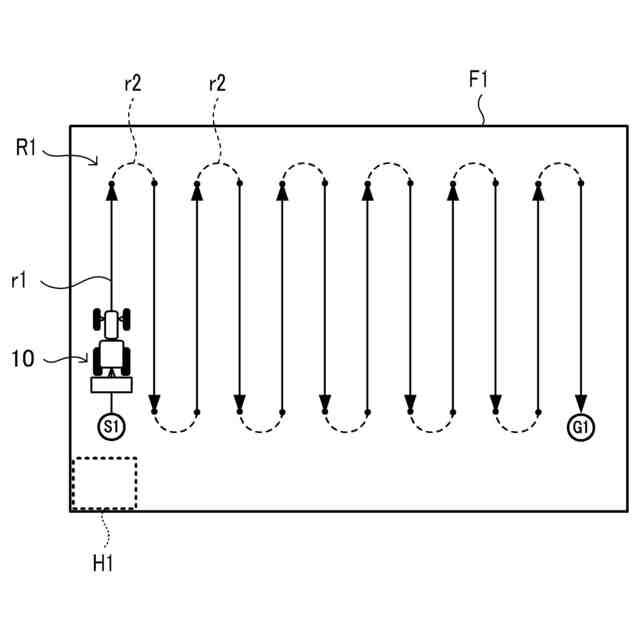
図4Aは、本発明の実施形態に係る作業車両の目標経路の一例を示す図である。
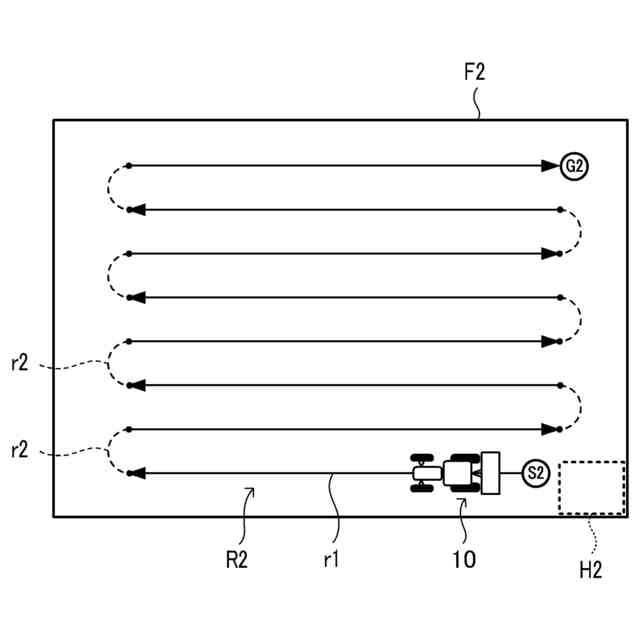
図4Bは、本発明の実施形態に係る作業車両の目標経路の一例を示す図である。
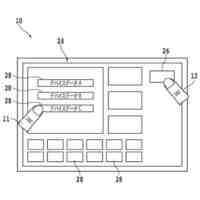
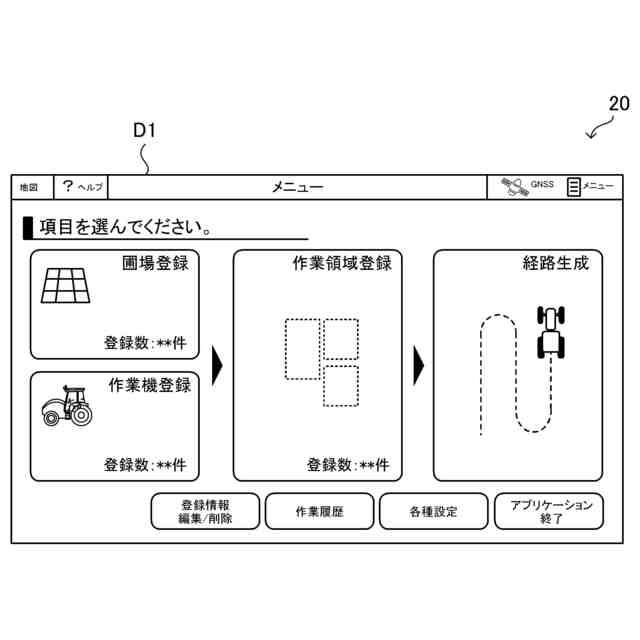
図5Aは、本発明の実施形態に係る操作端末に表示される操作画面の一例を示す図である。
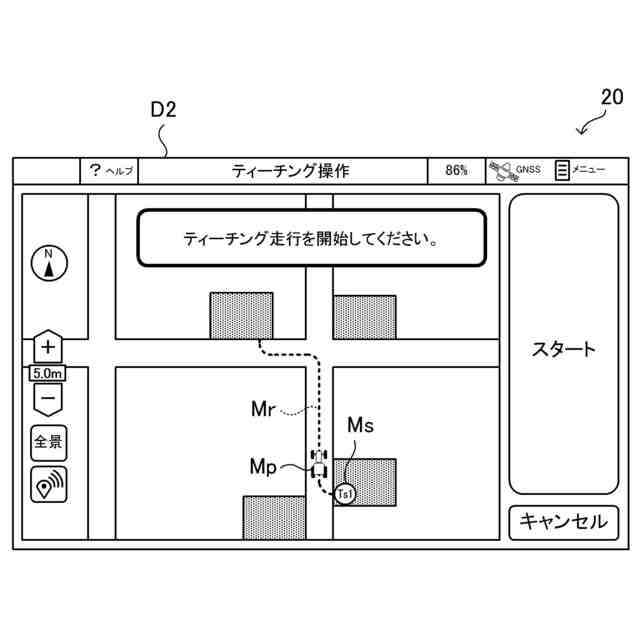
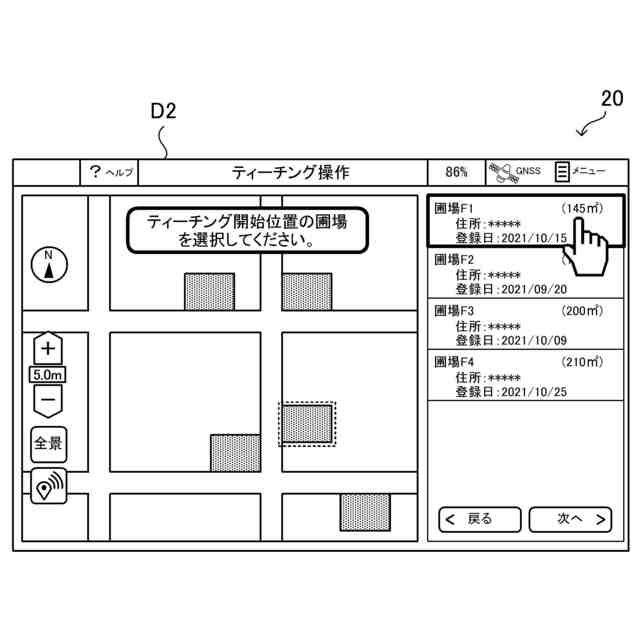
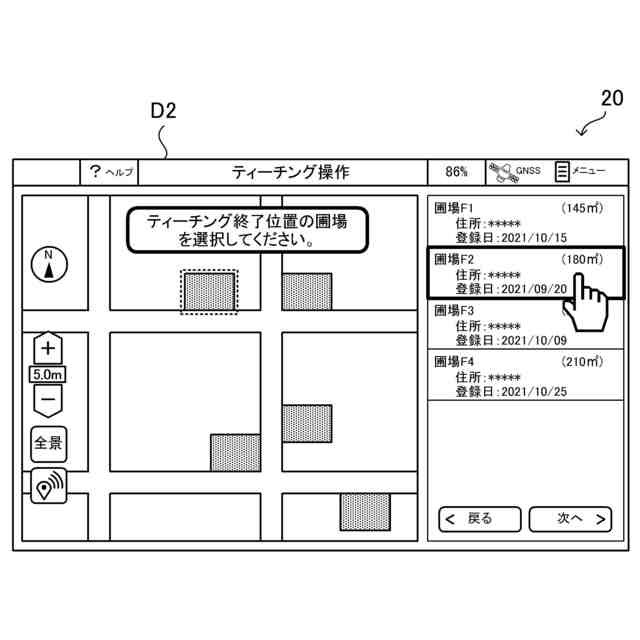
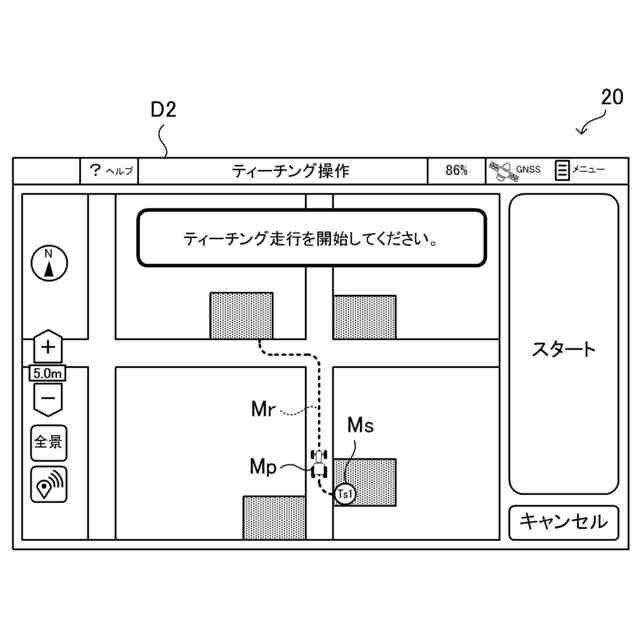
図5Bは、本発明の実施形態に係る操作端末に表示されるティーチング操作画面の一例を示す図である。
図5Cは、本発明の実施形態に係る操作端末に表示されるティーチング操作画面の一例を示す図である。
図6Aは、本発明の実施形態に係る操作端末に表示されるティーチング操作画面の一例を示す図である。
図6Bは、本発明の実施形態に係る操作端末に表示されるティーチング操作画面の一例を示す図である。
図6Cは、本発明の実施形態に係る操作端末に表示されるティーチング操作画面の一例を示す図である。
図7は、本発明の実施形態に係る作業車両の圃場間経路の一例を示す図である。
図8は、本発明の実施形態に係る圃場間経路情報テーブルの一例を示す図である。
図9は、本発明の実施形態に係る操作端末に表示される操作画面の一例を示す図である。
図10は、本発明の実施形態に係る自動走行システムによって実行される自動走行処理の手順の一例を示すフローチャートである。
図11は、本発明の実施形態に係る自動走行システムによって実行されるティーチング処理の手順の一例を示すフローチャートである。
図12Aは、本発明の実施形態に係る作業車両の補間経路の一例を示す図である。
図12Bは、本発明の実施形態に係る作業車両の補間経路の一例を示す図である。
図13は、本発明の実施形態に係る作業車両の圃場間経路の一例を示す図である。
図14は、本発明の実施形態に係る作業車両の圃場間経路の一例を示す図である。
図15は、本発明の実施形態に係る作業車両の領域間経路の一例を示す図である。
図16は、本発明の実施形態に係るティーチング走行により取得される位置情報の一例を示す図である。
図17は、本発明の実施形態に係る作業車両の圃場間経路の一例を示す図である。
図18Aは、本発明の実施形態に係る作業車両の圃場間経路の生成方法の一例を示す図である。
図18Bは、本発明の実施形態に係る作業車両の圃場間経路の生成方法の一例を示す図である。
図18Cは、本発明の実施形態に係る作業車両の圃場間経路の生成方法の一例を示す図である。
図19Aは、本発明の実施形態に係る作業車両の圃場間経路の生成方法の一例を示す図である。
図19Bは、本発明の実施形態に係る作業車両の圃場間経路の生成方法の一例を示す図である。
図19Cは、本発明の実施形態に係る作業車両の圃場間経路の生成方法の一例を示す図である。
図20は、本発明の実施形態に係る作業車両の圃場間経路の一例を示す図である。
図21は、本発明の実施形態に係る作業車両の圃場間経路の一例を示す図である。
図22は、本発明の実施形態に係る作業車両の圃場間経路の編集操作の一例を示す図である。
図23は、本発明の実施形態に係る作業車両の圃場間経路の編集操作の一例を示す図である。
図24は、本発明の実施形態に係る作業車両の圃場間経路の編集操作の一例を示す図である。
図25Aは、本発明の実施形態に係る作業車両の補間経路の他の例を示す図である。
図25Bは、本発明の実施形態に係る作業車両の補間経路の他の例を示す図である。
図26Aは、本発明の実施形態に係る作業車両の補間経路の他の例を示す図である。
図26Bは、本発明の実施形態に係る作業車両の補間経路の他の例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
無人走行体
1か月前
株式会社クボタ
作業車
1か月前
アズビル株式会社
電圧出力回路
1か月前
アズビル株式会社
流量制御装置
10日前
ミネベアミツミ株式会社
入力装置
1日前
トヨタ自動車株式会社
自動走行搬送車
9日前
エイブリック株式会社
ボルテージレギュレータ
9日前
株式会社クボタ
故障診断装置
8日前
株式会社クボタ
操作機構及び作業車
1か月前
株式会社デンソー
制御装置
14日前
リックス株式会社
状態検出装置
4日前
日本プラスト株式会社
節度感付加装置
28日前
株式会社デンソー
制御装置
14日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
23日前
株式会社GSユアサ
電力変換装置
17日前
株式会社オリジン
電源装置
23日前
株式会社デンソー
電子制御装置
1か月前
株式会社豊田自動織機
車両用の電動圧縮機
1か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
14日前
THK株式会社
編集装置及び編集方法
23日前
THK株式会社
編集装置及び編集方法
23日前
株式会社ディスコ
加工装置
28日前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
22日前
村田機械株式会社
走行車システム
24日前
株式会社FUJI
暖機運転システムを備えた工作機械
29日前
東洋電装株式会社
移動検出装置および鞍乗車両
16日前
村田機械株式会社
搬送車システム
1か月前
株式会社デンソー
ペダル装置
1か月前
株式会社デンソー
ペダル装置
14日前
愛三工業株式会社
弁システム
29日前
DMG森精機株式会社
工作機械
1か月前
株式会社ダイフク
無人航空機の搬送システム
16日前
八重洲無線株式会社
回動つまみの回動軸への取り付け機構
22日前
株式会社SUBARU
電気自動車
25日前
株式会社ディスコ
加工装置
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ