TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023079111
公報種別
公開特許公報(A)
公開日
2023-06-07
出願番号
2021192567
出願日
2021-11-26
発明の名称
ロボットアームおよびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20230531BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】内部に引き回される配線の揺動を抑制可能なロボットアーム、ならびに、かかるロボットアームを備えるロボットシステムを提供すること。
【解決手段】第1部材と、前記第1部材に位置する軸に沿って並進または前記軸まわりに回転する第2部材と、を備え、前記第1部材は、ベースと、駆動力を発生する駆動部と、従動プーリーを有し、前記第2部材に前記駆動力を伝達する関節部と、前記駆動部が発生させた前記駆動力を前記従動プーリーに伝達するベルトと、前記軸に沿って平面視したとき、前記従動プーリーおよび前記ベルトで囲まれる領域と重なる位置に設けられ、振動を検出するセンサーと、前記領域に引き回され、前記センサーと接続される配線と、前記領域に設けられ、前記配線を支持する支持部材と、を有することを特徴とするロボットアーム。
【選択図】図2
特許請求の範囲
【請求項1】
第1部材と、
前記第1部材に位置する軸に沿って並進または前記軸まわりに回転する第2部材と、
を備え、
前記第1部材は、
ベースと、
駆動力を発生する駆動部と、
従動プーリーを有し、前記第2部材に前記駆動力を伝達する関節部と、
前記駆動部が発生させた前記駆動力を前記従動プーリーに伝達するベルトと、
前記軸に沿って平面視したとき、前記従動プーリーおよび前記ベルトで囲まれる領域と重なる位置に設けられ、振動を検出するセンサーと、
前記領域に引き回され、前記センサーと接続される配線と、
前記領域に設けられ、前記配線を支持する支持部材と、
を有することを特徴とするロボットアーム。
続きを表示(約 1,100 文字)
【請求項2】
前記支持部材は、前記ベルトの内側を通過して延在する柱状をなしており、
前記配線は、前記支持部材に沿って支持される請求項1に記載のロボットアーム。
【請求項3】
前記ベースは、前記ベルトが通過している内部空間を介して互いに対向する第1基体および第2基体を備え、
前記支持部材は、一方の端部が前記第1基体に固定され、他方の端部が前記第2基体に固定されている請求項2に記載のロボットアーム。
【請求項4】
前記ベースは、前記ベルトが通過している内部空間を介して互いに対向する第1基体および第2基体を備え、
前記支持部材は、一方の端部が前記第1基体に固定され、他方の端部が前記第2基体から離れている請求項2に記載のロボットアーム。
【請求項5】
前記第1基体は、前記軸と平行な方向に貫通する第1貫通孔を有し、
前記第2基体は、前記軸と平行な方向に貫通する第2貫通孔を有し、
前記配線は、前記第1貫通孔、前記内部空間および前記第2貫通孔を通過する経路で引き回されている請求項3または4に記載のロボットアーム。
【請求項6】
前記支持部材は、横断面形状が中空部を有する形状をなしており、
前記配線の少なくとも一部は、前記中空部に収まっている請求項2ないし5のいずれか1項に記載のロボットアーム。
【請求項7】
前記配線を前記支持部材に留める係留部材を有する請求項2ないし6のいずれか1項に記載のロボットアーム。
【請求項8】
前記支持部材は、幅が部分的に狭くなっている縮幅部を有し、
前記係留部材は、前記配線を前記縮幅部に留めている請求項7に記載のロボットアーム。
【請求項9】
第1部材と、
前記第1部材に位置する軸に沿って並進または前記軸まわりに回転する第2部材と、
を備え、
前記第1部材は、
ベースと、
駆動力を発生する駆動部と、
従動プーリーを有し、前記第2部材に前記駆動力を伝達する関節部と、
前記駆動部が発生させた前記駆動力を前記従動プーリーに伝達するベルトと、
前記従動プーリーおよび前記ベルトで囲まれる領域に引き回されている配線と、
前記領域に設けられ、前記配線を支持する支持部材と、
を有することを特徴とするロボットアーム。
【請求項10】
請求項1ないし9のいずれか1項に記載のロボットアームと、
前記ロボットアームの動作を制御する制御装置と、
を備えることを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットアームおよびロボットシステムに関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
人件費の高騰や人手不足に伴い、製造現場に各種ロボットの導入が進んでいる。ロボットは、様々な動きをするロボットアームを備え、人の手によって行われてきた作業を自動化する。
【0003】
例えば、特許文献1には、本体と、本体に連結されている水平関節型アームと、を備えるスカラ型ロボットが開示されている。水平関節型アームは、第1アームおよび第2アームで構成されている。第1アームの基端部は、垂直に延在する回転軸を介して本体に回動自在に連結されている。また、第2アームの基端部は、垂直に延在する別の回動軸を介して第1アームの先端部に回動自在に連結されている。さらに、第2アームの先端部には、ボールスプラインのスプライン軸で構成された作動軸と、作動軸の軸方向の移動および軸まわりの回転を行わせる機構と、作動軸を軸方向に駆動するZ軸モーターと、作動軸を軸まわりに回転駆動するR軸モーターと、が設けられている。そして、Z軸モーターと移動機構との間では、プーリーやタイミングベルト等を介して駆動力が伝達される。同様に、R軸モーターと回転機構との間でも、プーリーやタイミングベルト等を介して駆動力が伝達される。このような駆動力の伝達により、作動軸を移動または回転させることができ、作動軸に取り付けたチャック部材が操作される。
【0004】
近年、ロボットの高度化が求められており、それに伴って、ロボットアームに様々な機能部品を取り付ける需要が高まっている。機能部品は、ロボットの本体との間で、電力線や通信線を介して接続される必要がある。これらの配線は、ロボットアームの内部に敷設されることにより、ロボットアームと物体との接触に伴う断線等を防止する。また、機能部品としては、例えば、ロボットアームの動きを検出するセンサー等が挙げられる。センサー等の機能部品は、ロボットアームの先端部に取り付けられることで、高い特性を得られることが多い。このため、配線は、ロボットアームの基端部から先端部まで、ロボットアームを縦断するように敷設される。
【先行技術文献】
【特許文献】
【0005】
特開平7-116974号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、ロボットアームの内部には、タイミングベルト等の駆動力伝達部品が配置されている。センサー等の配線が駆動力伝達部品に接触すると、断線や接続不良の原因となる。特に、配線が固定されていない場合、ロボットアームの動きに伴って配線が揺れるため、タイミングベルト等への接触が発生しやすい。このため、配線をロボットアームの内部に固定する等して、センサー等の配線が揺動するのを抑制するロボットアームを実現することが課題となっている。
【課題を解決するための手段】
【0007】
本発明の適用例に係るロボットアームは、
第1部材と、
前記第1部材に位置する軸に沿って並進または前記軸まわりに回転する第2部材と、
を備え、
前記第1部材は、
ベースと、
駆動力を発生する駆動部と、
従動プーリーを有し、前記第2部材に前記駆動力を伝達する関節部と、
前記駆動部が発生させた前記駆動力を前記従動プーリーに伝達するベルトと、
前記軸に沿って平面視したとき、前記従動プーリーおよび前記ベルトで囲まれる領域と重なる位置に設けられ、振動を検出するセンサーと、
前記領域に引き回され、前記センサーと接続される配線と、
前記領域に設けられ、前記配線を支持する支持部材と、
を有することを特徴とする。
【0008】
本発明の適用例に係るロボットアームは、
第1部材と、
前記第1部材に位置する軸に沿って並進または前記軸まわりに回転する第2部材と、
を備え、
前記第1部材は、
ベースと、
駆動力を発生する駆動部と、
従動プーリーを有し、前記第2部材に前記駆動力を伝達する関節部と、
前記駆動部が発生させた前記駆動力を前記従動プーリーに伝達するベルトと、
前記従動プーリーおよび前記ベルトで囲まれる領域に引き回されている配線と、
前記領域に設けられ、前記配線を支持する支持部材と、
を有することを特徴とする。
【0009】
本発明の適用例に係るロボットシステムは、
本発明の適用例に係るロボットアームと、
前記ロボットアームの動作を制御する制御装置と、
を備えることを特徴とする。
【図面の簡単な説明】
【0010】
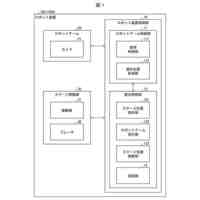
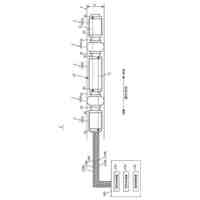
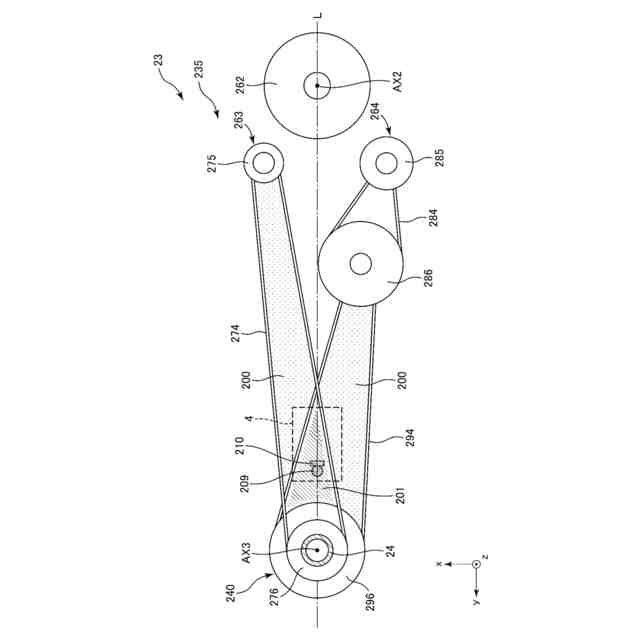
実施形態に係るロボットシステムを示す側面図である。
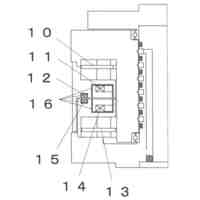
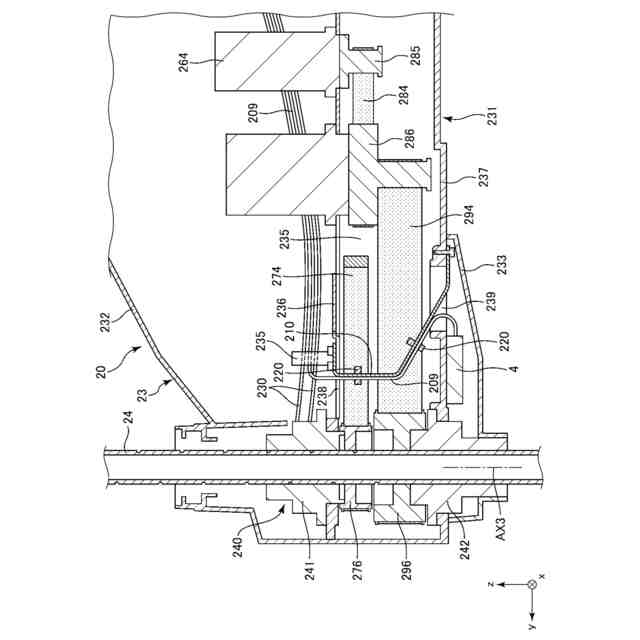
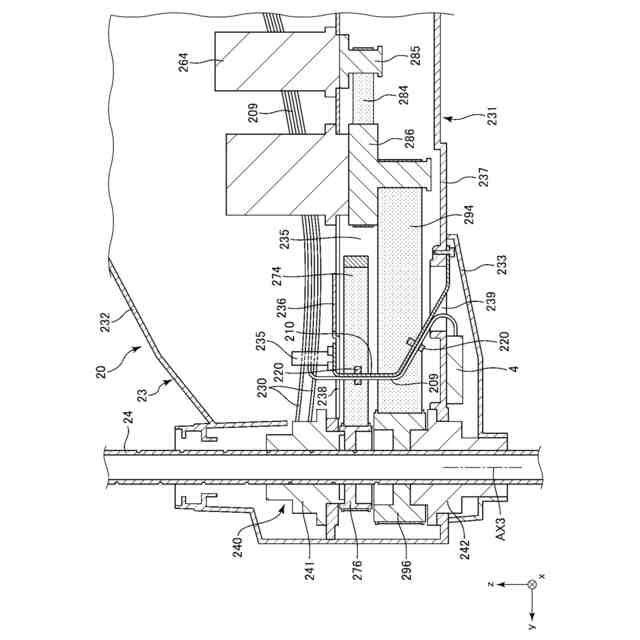
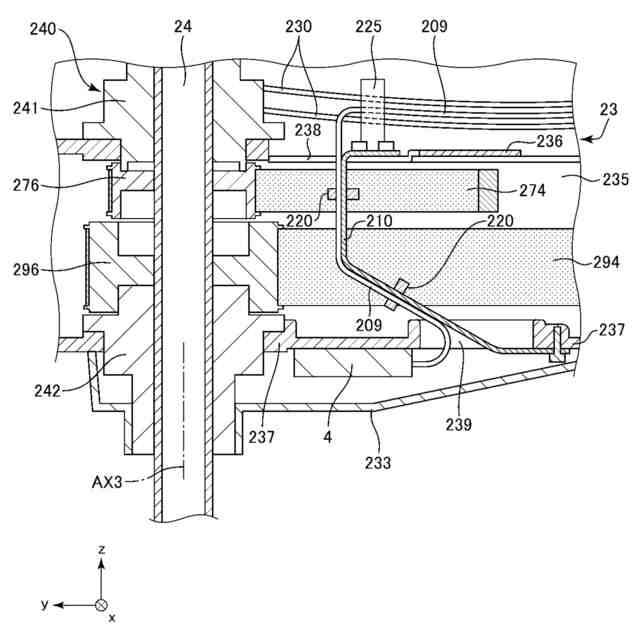
図1に示す第2アームの部分断面図である。
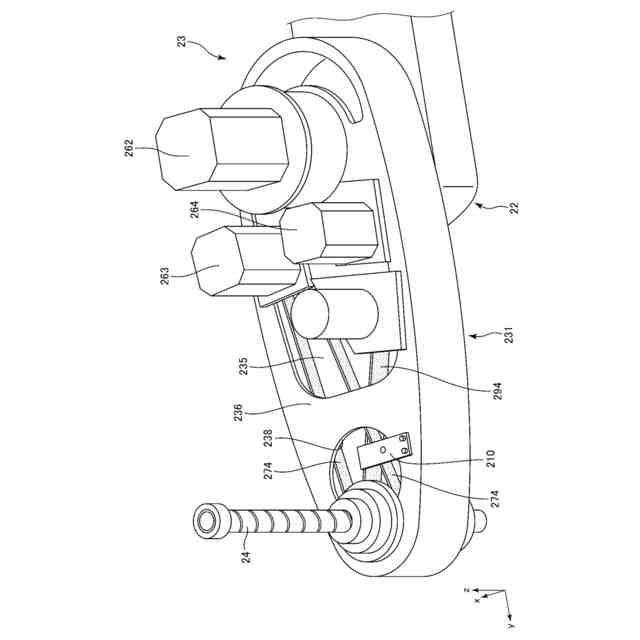
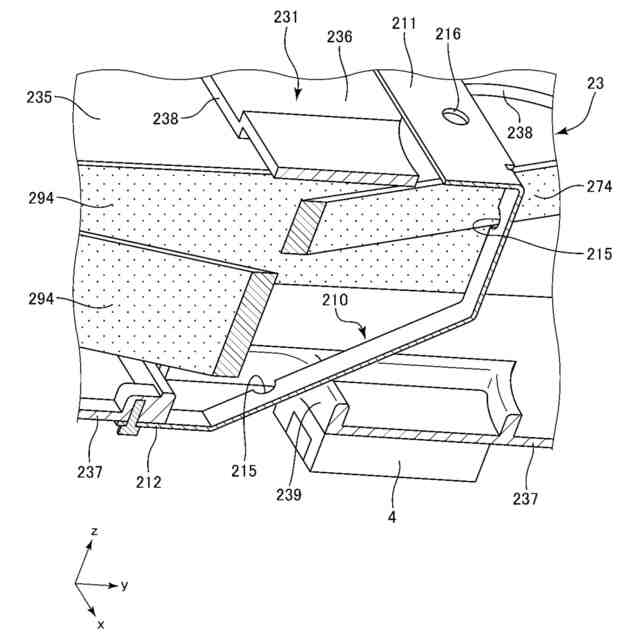
図1に示す第2アームの内部構造をz軸のプラス側からマイナス側に向かって見たときの斜視図である。
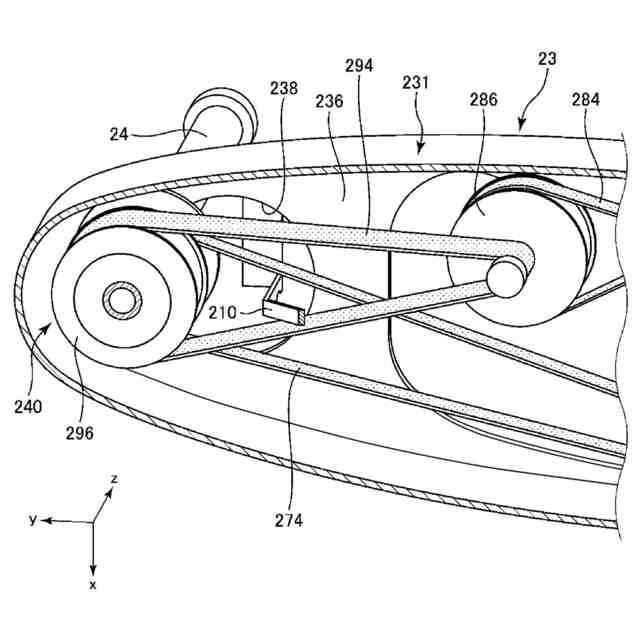
図3に示す第2アームをx-y面で切断した断面を、z軸のマイナス側からプラス側に向かって見たときの部分断面斜視図である。
シャフトに接続されている従動プーリーとベルトとで囲まれる領域を示す図である。
図2の部分拡大図であって、内部空間における配線の引き回し経路を示す図である。
図6に示す支持部材近傍の部分拡大斜視図である。
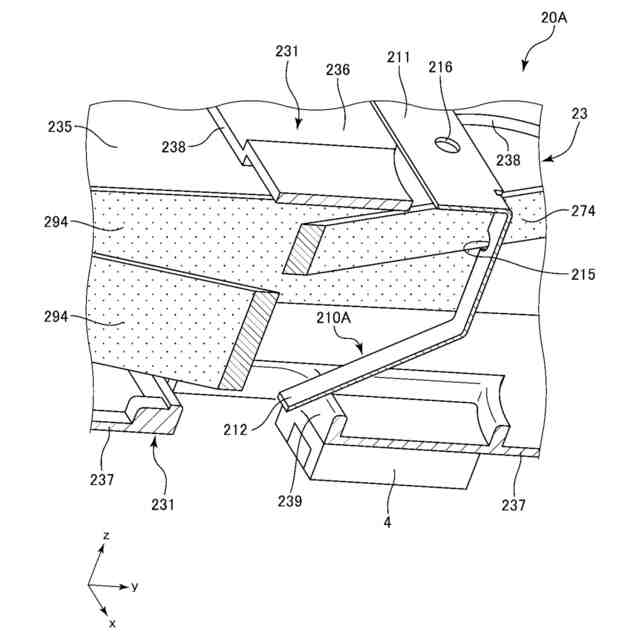
第1変形例に係るロボットアームを示す部分拡大斜視図である。
第2変形例に係るロボットアームが有する支持部材を示す部分拡大斜視図である。
第3変形例に係るロボットアームを示す部分拡大断面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
6か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
15日前
株式会社ツノダ
挟持工具
2か月前
個人
ペットボトル用蓋開け具。
5か月前
UTM株式会社
搬送装置
5か月前
株式会社ツノダ
挟持工具
1か月前
株式会社右川ゴム製造所
把持装置
24日前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
学校法人立命館
グリッパ
1か月前
トヨタ自動車株式会社
関節機構
4か月前
株式会社不二越
ロボット
4か月前
株式会社不二越
ロボット
6か月前
オムロン株式会社
ロボット装置
7か月前
学校法人立命館
ロボットハンド
1か月前
トヨタ自動車株式会社
関節機構
4か月前
個人
プーリーキー抜き治具
1か月前
個人
作業台
5か月前
オムロン株式会社
ロボットハンド
6か月前
川崎重工業株式会社
ロボット
6か月前
株式会社近藤製作所
ロータリージョイント
6か月前
株式会社不二越
予測システム
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
株式会社ダイヘン
画像生成装置
24日前
工機ホールディングス株式会社
作業機
2か月前
学校法人 中央大学
管内移動ロボット
6か月前
株式会社ダイヘン
画像生成装置
24日前
工機ホールディングス株式会社
作業機
4か月前
株式会社越智工業所
ブレーカ用カバー
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
情報処理装置
24日前
工機ホールディングス株式会社
作業機
2か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ