TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023078841
公報種別
公開特許公報(A)
公開日
2023-06-07
出願番号
2021192143
出願日
2021-11-26
発明の名称
自動走行方法、自動走行システム、及び自動走行プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20230531BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動走行可能な作業車両における目標経路への追従性を向上させることが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供すること。
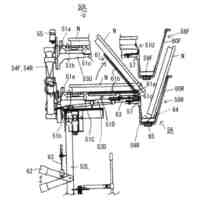
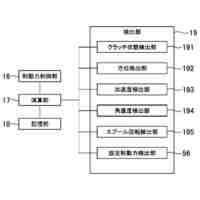
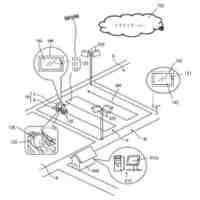
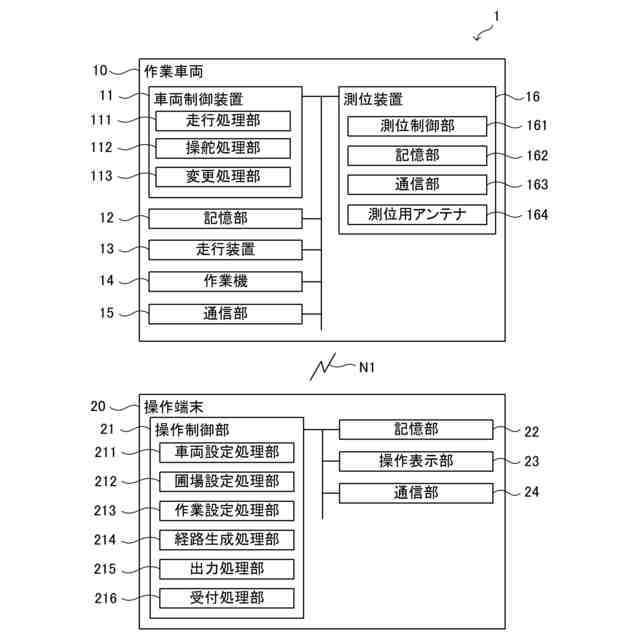
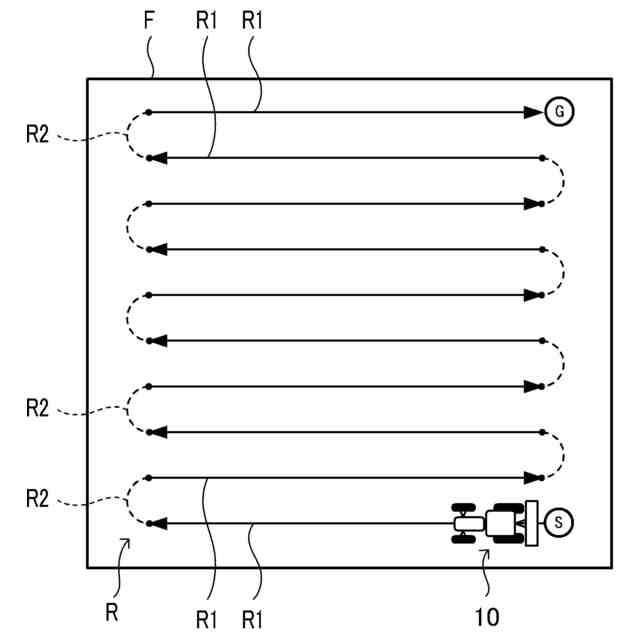
【解決手段】自動走行システム1は、圃場Fにおいて作業車両10を目標経路Rに従って自動走行させる走行処理部111と、予め設定された操舵感度に基づいて作業車両10を操舵する操舵処理部112と、作業車両10が自動走行中に、予め設定された前記操舵感度を変更可能とする変更処理部113とを備える。
【選択図】図7B
特許請求の範囲
【請求項1】
作業領域において作業車両を目標経路に従って自動走行させることと、
予め設定された操舵感度に基づいて、前記作業車両を操舵することと、
前記作業車両が自動走行中に、予め設定された前記操舵感度を変更可能とすることと、
を実行する自動走行方法。
続きを表示(約 1,200 文字)
【請求項2】
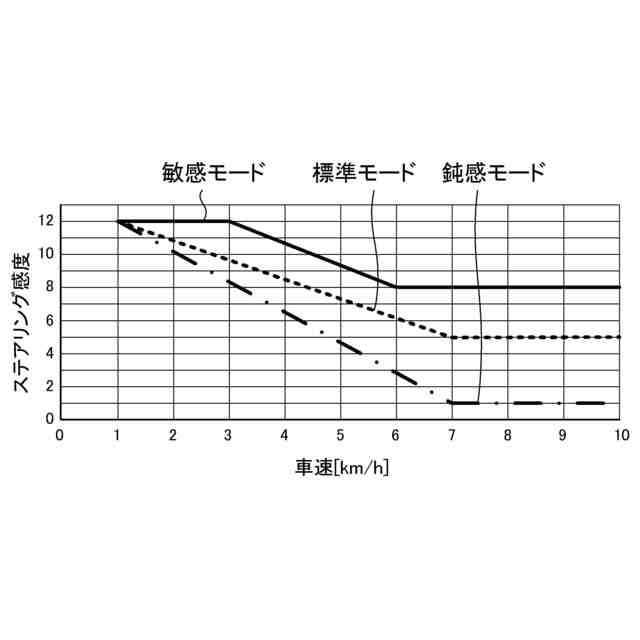
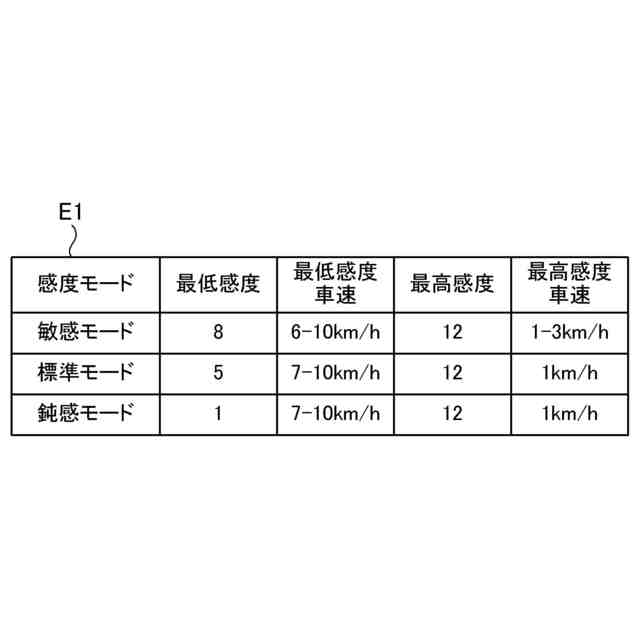
互いに操舵感度が異なる複数の感度モードのうちいずれかの感度モードである第1感度モードに設定し、
前記第1感度モードにおいて、前記作業領域の状態及び前記作業車両の状態の少なくともいずれかに基づいて、前記操舵感度を変更する、
請求項1に記載の自動走行方法。
【請求項3】
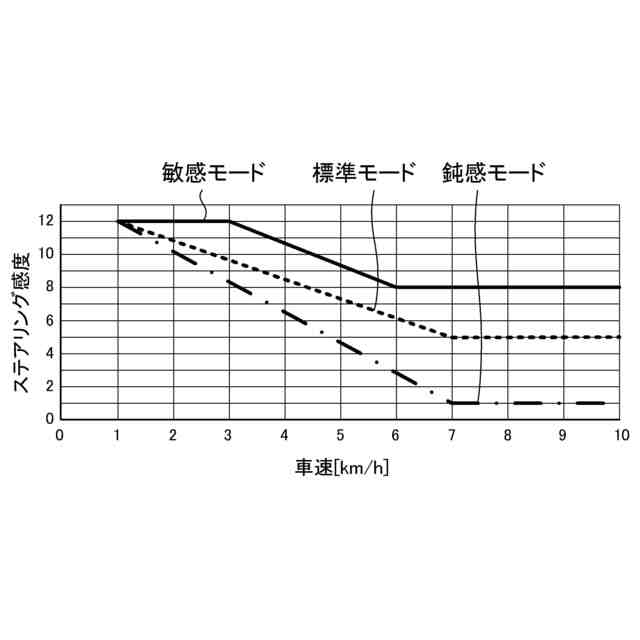
前記第1感度モードにおいて、前記作業車両の車速に基づいて前記操舵感度を変更する、
請求項2に記載の自動走行方法。
【請求項4】
前記車速が第1速度の場合の前記操舵感度を、前記車速が前記第1速度よりも遅い第2速度の場合の前記操舵感度よりも低い感度に設定する、
請求項3に記載の自動走行方法。
【請求項5】
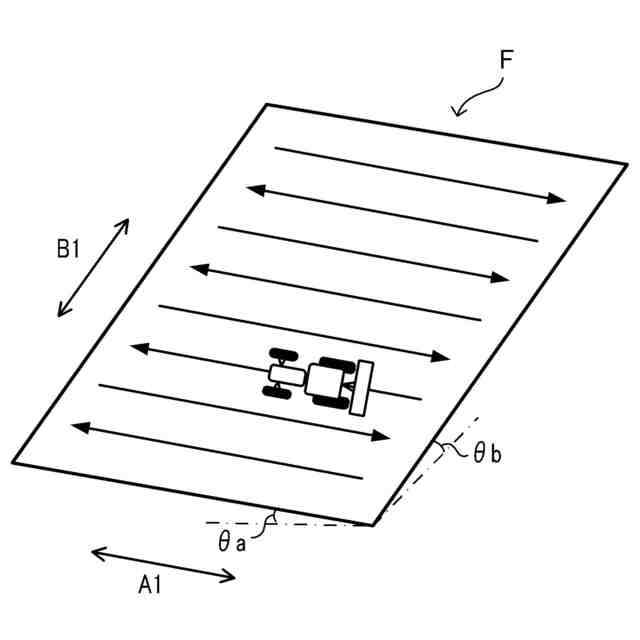
前記第1感度モードにおいて、前記作業領域の傾斜角度に基づいて前記操舵感度を変更する、
請求項2に記載の自動走行方法。
【請求項6】
前記傾斜角度が第1角度の場合の前記操舵感度を、前記傾斜角度が前記第1角度よりも大きい第2角度の場合の前記操舵感度よりも高い感度に設定する、
請求項5に記載の自動走行方法。
【請求項7】
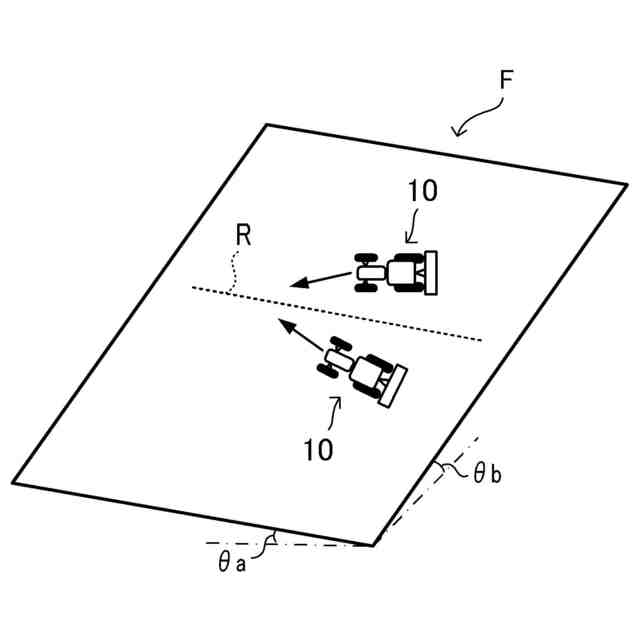
前記作業領域が所定の傾斜角度を有する傾斜地である場合において、前記作業車両の位置が前記目標経路に対して前記傾斜地の下側に位置する場合の前記操舵感度を、前記作業車両の位置が前記目標経路に対して前記傾斜地の上側に位置する場合の前記操舵感度よりも高い感度に設定する、
請求項5又は6に記載の自動走行方法。
【請求項8】
前記複数の感度モードに含まれる第1感度モードにおいて前記操舵感度の第1上限値が設定されており、
前記複数の感度モードに含まれる第2感度モードにおいて前記操舵感度の第2上限値が設定されており、
前記操舵感度を前記第1上限値に設定する場合の前記作業車両の最高車速と、前記操舵感度を前記第2上限値に設定する場合の前記作業車両の最高車速とは、互いに異なる速度に設定されている、
請求項2に記載の自動走行方法。
【請求項9】
前記複数の感度モードに含まれる第1感度モードに対して、第1操舵感度から第2操舵感度まで変更可能な複数段階の操舵感度が設定されており、
前記複数の感度モードに含まれる第2感度モードに対して、第1操舵感度とは異なる第3操舵感度から前記第2操舵感度まで変更可能な複数段階の操舵感度が設定されている、
請求項2に記載の自動走行方法。
【請求項10】
前記作業車両が自動走行中にユーザーから前記操舵感度を変更する操作を受け付けた場合に、予め設定された前記操舵感度を変更する、
請求項1に記載の自動走行方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両を自動走行させる自動走行方法、自動走行システム、及び自動走行プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
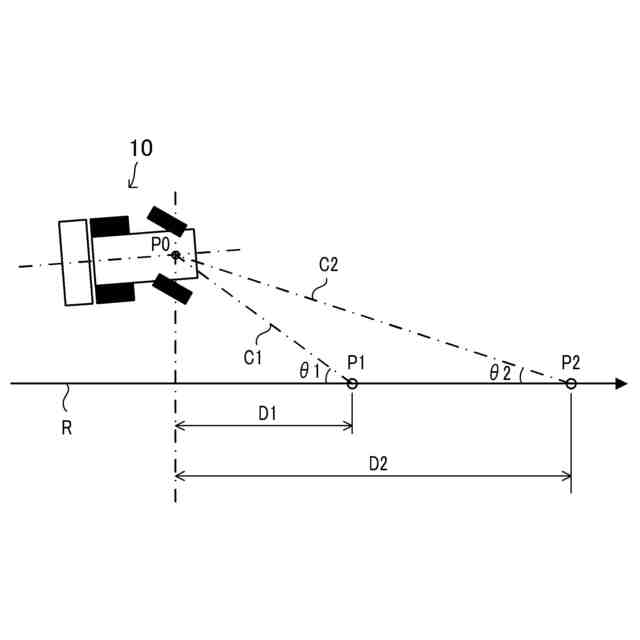
従来、作業車両の位置情報に基づいて、予め設定された目標経路を自動走行する作業車両が知られている。例えば前記作業車両は、目標経路上の前方目標点を設定し、当該前方目標点に向かって走行することにより、目標経路に沿って走行を行うことが可能となる(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2002-358122号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、前記従来の技術において、前方目標点を設定する位置によっては前方目標点と目標経路とが成す角度が異なる。前記角度は作業車両が操舵する角度に対応するため前記角度が大きいほど操舵感度は高く、前記角度が小さいほど操舵感度は低くなる。前記操舵感度が高いと素早く目標経路に復帰することができる反面、急激な方向転換となるため作業車両の挙動が不安定になる。一方で、前記操舵感度が低い場合には、作業車両の挙動は安定するものの、目標経路に復帰する時間が長くなる。
【0005】
このように、従来の作業車両では、予め設定された操舵感度に応じて自動走行を行っているため、目標経路への追従性が低下する問題が生じる。
【0006】
本発明の目的は、自動走行可能な作業車両における目標経路への追従性を向上させることが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供することにある。
【課題を解決するための手段】
【0007】
本発明に係る自動走行方法は、作業領域において作業車両を目標経路に従って自動走行させることと、予め設定された操舵感度に基づいて、前記作業車両を操舵することと、前記作業車両が自動走行中に、予め設定された前記操舵感度を変更可能とすることと、を実行する方法である。
【0008】
本発明に係る自動走行システムは、作業領域において作業車両を目標経路に従って自動走行させる走行処理部と、予め設定された操舵感度に基づいて、前記作業車両を操舵する操舵処理部と、前記作業車両が自動走行中に、予め設定された前記操舵感度を変更可能とする変更処理部と、を備えるシステムである。
【0009】
本発明に係る自動走行プログラムは、作業領域において作業車両を目標経路に従って自動走行させることと、予め設定された操舵感度に基づいて、前記作業車両を操舵することと、前記作業車両が自動走行中に、予め設定された前記操舵感度を変更可能とすることと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0010】
本発明によれば、自動走行可能な作業車両における目標経路への追従性を向上させることが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
魚釣用ルアー
16日前
個人
動物飼育用ケージ
1日前
個人
猫用のトイレ
1日前
個人
計量カップ付き肥料袋
14日前
個人
イカが傘針を開く餌木
23日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
個人
木造人工島の海産物農業
10日前
井関農機株式会社
収穫機
11日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
苗移植機
1日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
9日前
株式会社大垣化工
糸収容具
2日前
みのる産業株式会社
作業台車
3日前
個人
スライドハンマー
23日前
日東電工株式会社
水槽
17日前
積水樹脂株式会社
トンネル栽培用支柱
23日前
井関農機株式会社
乗用型苗植機
22日前
井関農機株式会社
乗用型苗植機
4日前
グローブライド株式会社
釣り具
24日前
カゴメ株式会社
トマト種子の製造方法
17日前
ロンタイ株式会社
植生体
1日前
井関農機株式会社
台木切断装置
14日前
井関農機株式会社
防除システム
8日前
井関農機株式会社
乗用型苗移植機
22日前
井関農機株式会社
農作業機用台車
17日前
個人
落口枡用取付部材及び落口枡
23日前
個人
水田用除草機器および水田用除草体
2日前
株式会社シマノ
釣糸ガイド及び釣竿
25日前
グローブライド株式会社
電動リール
28日前
株式会社クボタ
田植機
1日前
松山株式会社
農作業機
29日前
井関農機株式会社
障害物監視システム
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ