TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023078807
公報種別
公開特許公報(A)
公開日
2023-06-07
出願番号
2021192093
出願日
2021-11-26
発明の名称
アライメント装置、基板搬送システム、アライメント方法、及びプログラム
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
,
個人
主分類
H01L
21/68 20060101AFI20230531BHJP(基本的電気素子)
要約
【課題】基板に対する処理の安定化を図る。
【解決手段】アライメント装置は、支持部と、エッジセンサと、アライメント情報取得部と、異常判定部とを備える。支持部は、基板と、基板に対する所定の処理の際に用いられるリング部材とのそれぞれをワークとして支持する。エッジセンサは、支持部によって支持されたワークのエッジ位置を示すエッジ位置情報を取得する。アライメント情報取得部は、エッジ位置情報に基づいてワークのアライメントを行うためのアライメント情報を取得する。異常判定部は、エッジ位置情報と、基板及びリング部材のそれぞれに対して予め定められた判別情報とに基づいて、ワークの異常の有無を判定する。
【選択図】図15
特許請求の範囲
【請求項1】
基板と、前記基板に対する所定の処理の際に用いられるリング部材とのそれぞれをワークとして支持する支持部と、
前記支持部によって支持された前記ワークのエッジ位置を示すエッジ位置情報を取得するエッジセンサと、
前記エッジ位置情報に基づいて前記ワークのアライメントを行うためのアライメント情報を取得するアライメント情報取得部と、
前記エッジ位置情報と、前記基板及び前記リング部材のそれぞれに対して予め定められた判別情報とに基づいて、前記ワークの異常の有無を判定する異常判定部と、を備えるアライメント装置。
続きを表示(約 2,000 文字)
【請求項2】
前記判別情報は、前記基板及び前記リング部材のそれぞれについて正常であると判別されるエッジ条件を含み、
前記異常判定部は、
前記エッジ位置情報が前記判別情報に含まれるいずれかのエッジ条件に合致する場合に、前記ワークが正常であると判定し、
前記エッジ位置情報が前記判別情報に含まれるいずれのエッジ条件にも合致しない場合に、前記ワークが異常であると判定する、請求項1に記載のアライメント装置。
【請求項3】
前記異常判定部は、前記エッジ位置情報が前記判別情報に含まれるいずれか1つのエッジ条件に合致する場合に、前記1つのエッジ条件に応じて前記ワークの種別を判定する、請求項2に記載のアライメント装置。
【請求項4】
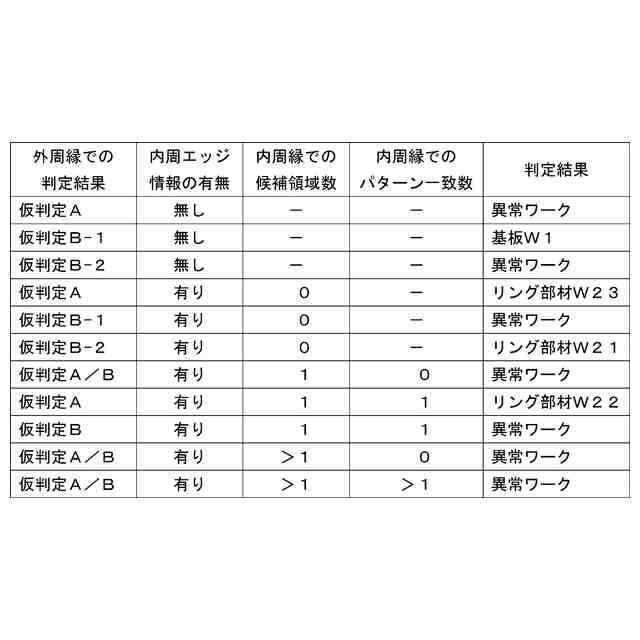
前記判別情報において予め定められたエッジ条件は、前記ワークの内周縁が存在するか否かを示す条件を含み、
前記エッジセンサは、前記ワークの外周縁の位置を示す外周エッジ情報と、前記ワークの外周縁よりも内側に存在し得る内周縁の位置を示す内周エッジ情報とを前記エッジ位置情報として取得するように構成されており、
前記異常判定部は、
前記内周エッジ情報が取得されない場合に、前記ワークの種別が前記基板であると判定し、
前記内周エッジ情報が取得された場合に、前記ワークの種別が前記リング部材であると判定する、請求項2又は3に記載のアライメント装置。
【請求項5】
前記ワークの種別を示すワーク情報を取得するワーク情報取得部を更に備え、
前記エッジセンサは、
前記ワーク情報によって示される前記ワークの種別が前記基板である場合に、前記基板の外周縁の位置を示す情報を前記エッジ位置情報として取得し、
前記ワーク情報によって示される前記ワークの種別が前記リング部材である場合に、前記リング部材の内周縁の位置を示す情報及び前記リング部材の外周縁の位置を示す情報を前記エッジ位置情報として取得し、
前記異常判定部は、前記エッジ位置情報と、前記判別情報のうち前記ワーク情報によって示される前記ワークの種別に対して予め定められた情報とに基づいて、前記ワークの異常の有無を判定する、請求項1又は2に記載のアライメント装置。
【請求項6】
前記ワークを支持した状態の前記支持部を所定の中心軸まわりに回転させる回転駆動部と、
前記回転駆動部が前記支持部を回転させている最中に前記エッジセンサによって取得された前記エッジ位置情報に基づいて、前記支持部の前記中心軸まわりの回転角度と、前記ワークのエッジ位置との関係を示すエッジプロファイルを生成するプロファイル生成部と、を更に備え、
前記アライメント情報取得部は、前記エッジプロファイルに基づいて前記アライメント情報を取得する、請求項2~5のいずれか一項に記載のアライメント装置。
【請求項7】
前記エッジプロファイルにおいて、前記ワークの位置決め部であると推定される候補領域を抽出する領域抽出部を更に備え、
前記判別情報において予め定められたエッジ条件は、前記ワークの位置決め部の個数を示す条件を含み、
前記異常判定部は、前記領域抽出部によって抽出された候補領域の個数が、前記判別情報における前記ワークの位置決め部のいずれの個数とも一致しない場合に、前記ワークが異常であると判定する、請求項6に記載のアライメント装置。
【請求項8】
前記領域抽出部は、前記エッジプロファイルから算出される前記ワークの中心位置まわりの仮想円と前記エッジプロファイルとを比較することで、前記ワークの位置決め部と推定される候補領域を抽出する、請求項7に記載のアライメント装置。
【請求項9】
前記判別情報において予め定められたエッジ条件は、前記ワークの位置決め部の基準形状を示す条件と前記ワークの位置決め部のエッジにおける形成位置を示す条件とを含み、
前記アライメント装置は、前記領域抽出部によって抽出された候補領域が前記基準形状に対応するか否かを判定する形状判定部を更に備え、
前記異常判定部は、前記形状判定部による判定結果と、前記基準形状に対応すると判定された候補領域の形成位置とに基づいて、前記ワークの異常の有無を判定する、請求項7又は8に記載のアライメント装置。
【請求項10】
前記アライメント情報取得部は、前記エッジプロファイルにおける前記ワークの位置決め部の位置を前記アライメント情報として取得し、
前記アライメント装置は、前記ワークの位置決め部の前記中心軸まわりの位置を目標位置に合わせるように前記回転駆動部により前記ワークの姿勢を調節する姿勢制御部を更に備える、請求項6~9のいずれか一項に記載のアライメント装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、アライメント装置、基板搬送システム、アライメント方法、及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、ウェハのエッジを検出するラインセンサを備えたアライメント装置が開示されている。このアライメント装置では、シリコンウェハとウェハ支持ガラス基板とを含む貼り合わせウェハのエッジが検出され、所定の場合に、シリコンウェハのエッジ検出と、ウェハ支持ガラス基板のエッジ検出とが切り替えられる。
【先行技術文献】
【特許文献】
【0003】
特開2011-181721号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、基板に対する処理の安定化に有用なアライメント装置、基板搬送システム、アライメント方法、及びプログラムを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るアライメント装置は、支持部と、エッジセンサと、アライメント情報取得部と、異常判定部とを備える。支持部は、基板と、基板に対する所定の処理の際に用いられるリング部材とのそれぞれをワークとして支持する。エッジセンサは、支持部によって支持されたワークのエッジ位置を示すエッジ位置情報を取得する。アライメント情報取得部は、エッジ位置情報に基づいてワークのアライメントを行うためのアライメント情報を取得する。異常判定部は、エッジ位置情報と、基板及びリング部材のそれぞれに対して予め定められた判別情報とに基づいて、ワークの異常の有無を判定する。
【0006】
本開示の一側面に係るアライメント方法は、基板と、基板に対する所定の処理の際に用いられるリング部材とのそれぞれをワークとして支持部に支持させることと、支持部によって支持されたワークのエッジ位置を示すエッジ位置情報を取得することと、エッジ位置情報に基づいてワークのアライメントを行うためのアライメント情報を取得することと、エッジ位置情報と、基板及びリング部材のそれぞれ対して予め定められた判別情報とに基づいて、ワークの異常の有無を判定することと、を含む。
【0007】
本開示の一側面に係るプログラムは、基板と、基板に対する所定の処理の際に用いられるリング部材とのそれぞれをワークとして支持部に支持させることと、支持部によって支持されたワークのエッジ位置を示すエッジ位置情報を取得することと、エッジ位置情報に基づいてワークのアライメントを行うためのアライメント情報を取得することと、エッジ位置情報と、基板及びリング部材のそれぞれに対して予め定められた判別情報とに基づいて、ワークの異常の有無を判定することと、をコンピュータに実行させる。
【発明の効果】
【0008】
本開示によれば、基板に対する処理の安定化に有用なアライメント装置、基板搬送システム、アライメント方法、及びプログラムが提供される。
【図面の簡単な説明】
【0009】
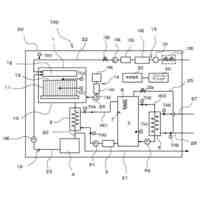
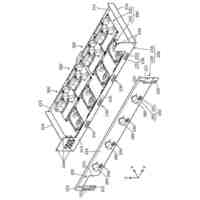
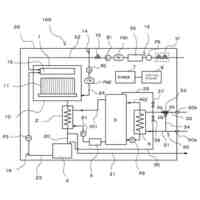
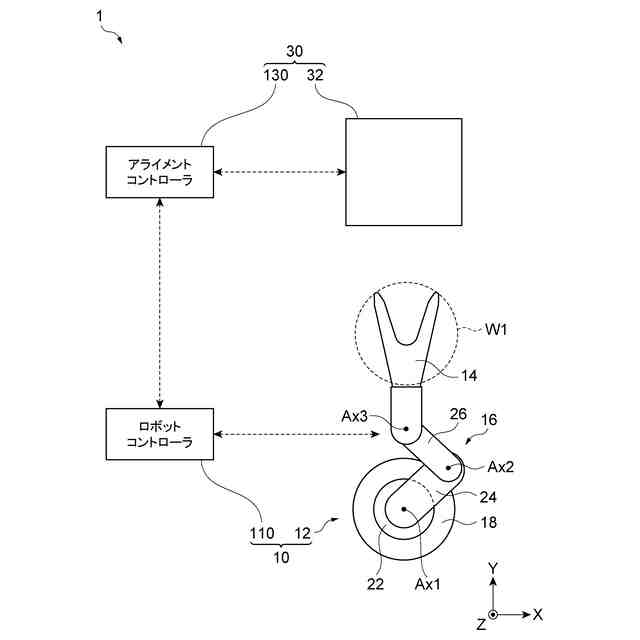
図1は、搬送システムの一例を示す模式図である。
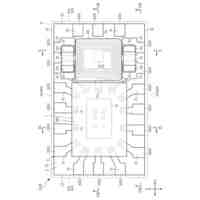
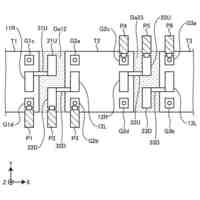
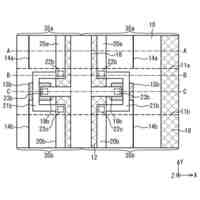
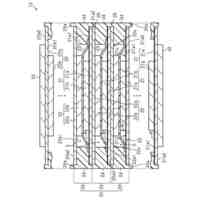
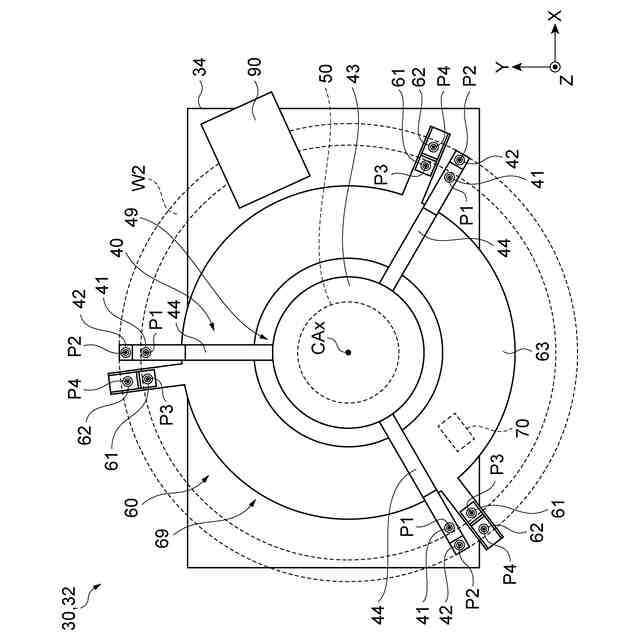
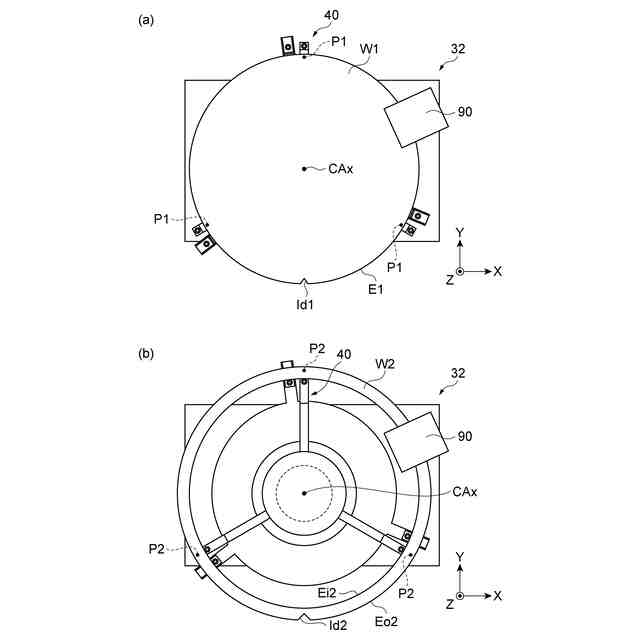
図2は、アライメント装置の構成の一例を模式的に示す平面図である。
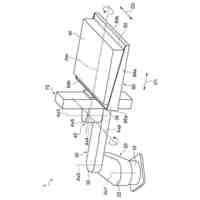
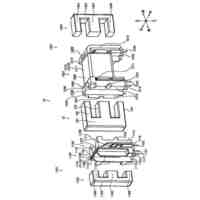
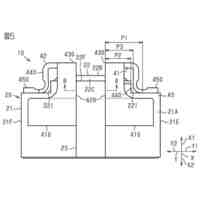
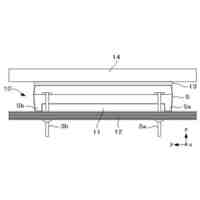
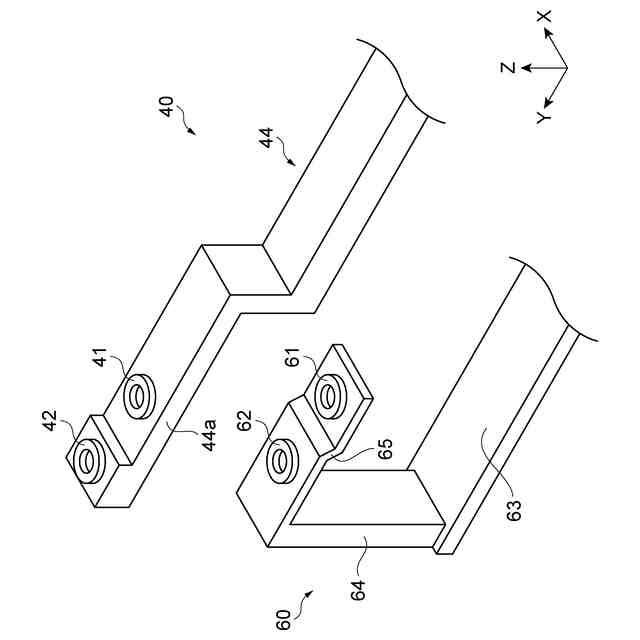
図3は、支持部及びリフト部の構成の一例を模式的に示す斜視図である。
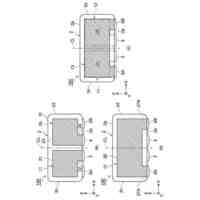
図4(a)は、基板を支持した状態のアライメント装置の一例を模式的に示す平面図である。図4(b)は、リング部材を支持した状態のアライメント装置の一例を模式的に示す平面図である。
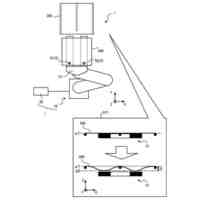
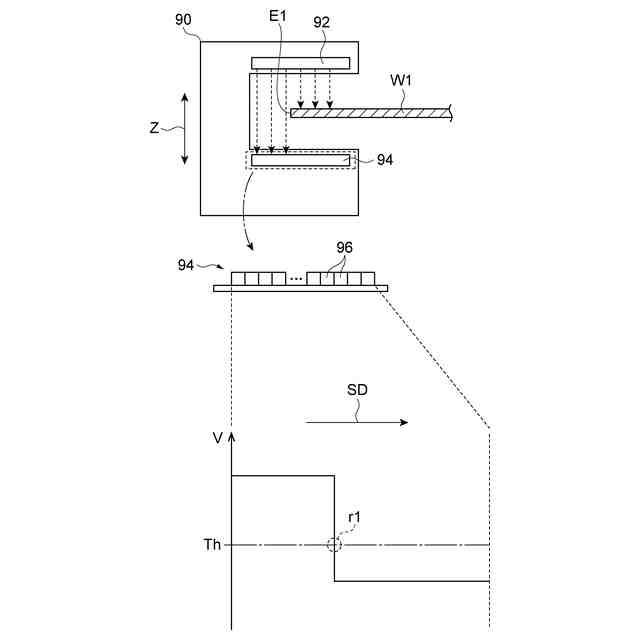
図5は、エッジセンサによる基板のエッジ位置の検出の様子を示す図である。
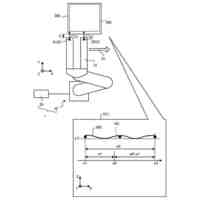
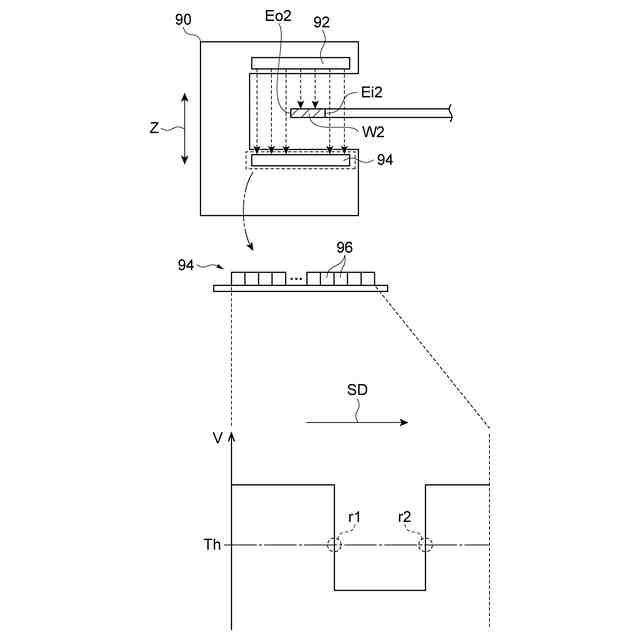
図6は、エッジセンサによるリング部材のエッジ位置の検出の様子を示す図である。
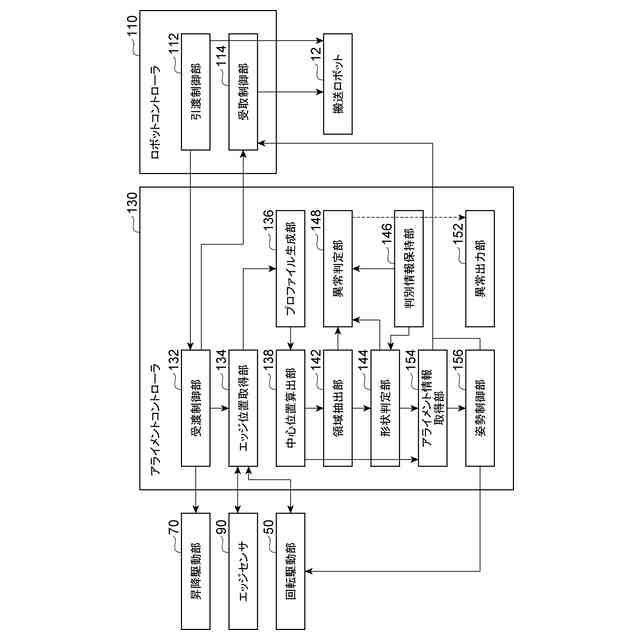
図7は、コントローラの機能構成の一例を示すブロック図である。
図8は、コントローラのハードウェア構成の一例を示すブロック図である。
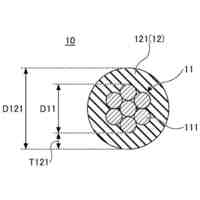
図9(a)、図9(b)、図9(c)、及び図9(d)は、複数種のワークの一例を示す模式図である。
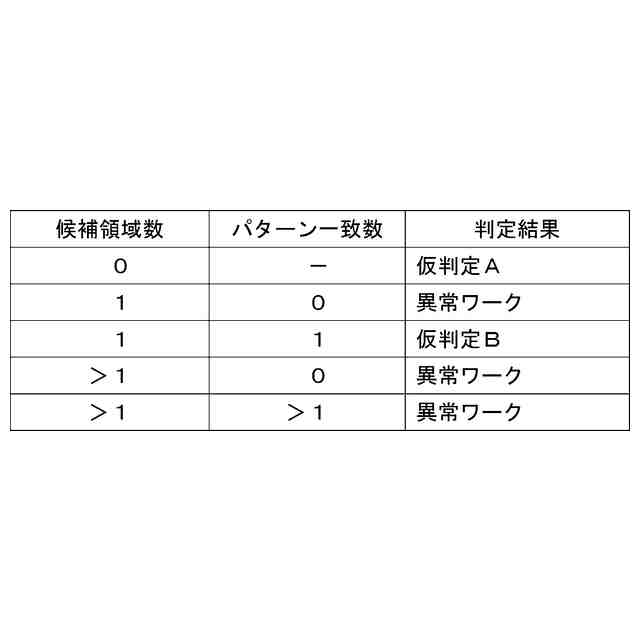
図10は、判別情報の一例を示す表である。
図11は、ワークの搬送処理の一例を示すフローチャートである。
図12は、アライメント準備処理の一例の前段部分を示すフローチャートである。
図13(a)は、エッジプロファイルの一例を示すグラフである。図13(b)は、ワークの中心位置の算出方法の一例を説明するための図である。
図14(a)は、位置決め部の候補領域の抽出方法の一例を説明するための図である。図14(b)は、位置決め部の基準形状の一例を示す模式図である。
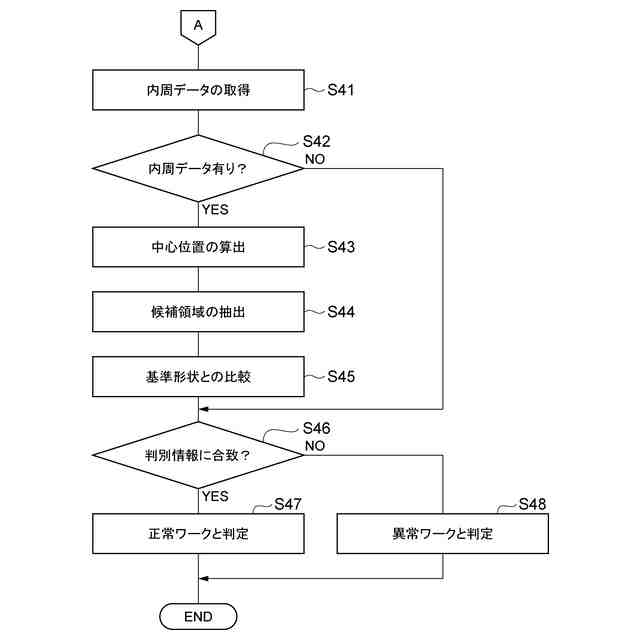
図15は、アライメント準備処理の一例の後段部分を示すフローチャートである。
図16は、コントローラの機能構成の一例を示すブロック図である。
図17は、アライメント準備処理の一例を示すフローチャートである。
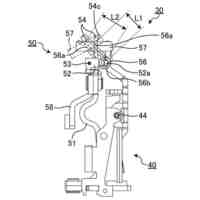
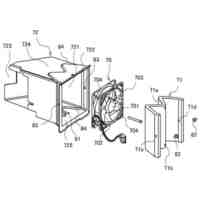
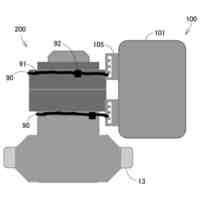
図18は、ハンドの一例を模式的に示す斜視図である。
図19(a)は、基板を保持した状態のハンドの一例を示す平面図である。図19(b)は、リング部材を保持した状態のハンドの一例を示す平面図である。
図20は、基板の保持位置とリング部材の保持位置との関係を説明するための平面図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して一実施形態について説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。一部の図面にはX軸、Y軸及びZ軸により規定される直交座標系が示される。以下の実施形態では、Z軸が上下方向に対応し、X軸及びY軸が水平方向に対応する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
搬送ロボット
6日前
株式会社安川電機
搬送システムおよび搬送方法
12日前
株式会社安川電機
搬送システムおよび搬送方法
12日前
エイブリック株式会社
半導体装置
13日前
ローム株式会社
半導体装置
12日前
エイブリック株式会社
半導体装置
15日前
ダイニチ工業株式会社
燃料電池装置
15日前
三菱電機株式会社
回路遮断器
8日前
ダイニチ工業株式会社
燃料電池装置
15日前
ダイニチ工業株式会社
燃料電池装置
15日前
ダイニチ工業株式会社
燃料電池装置
15日前
株式会社GSユアサ
蓄電装置
13日前
株式会社GSユアサ
蓄電装置
13日前
株式会社GSユアサ
蓄電設備
12日前
東京パーツ工業株式会社
コイル装置
今日
株式会社村田製作所
コイル部品
13日前
ダイニチ工業株式会社
換気ファン装置
15日前
KOA株式会社
電子部品
13日前
三菱電機株式会社
半導体ウエハ
14日前
株式会社村田製作所
コイル部品
13日前
株式会社村田製作所
コイル部品
13日前
住友電気工業株式会社
半導体装置
5日前
住友電気工業株式会社
電線
15日前
シャープ株式会社
通信装置
8日前
ダイニチ工業株式会社
燃料電池システム
15日前
ローム株式会社
半導体装置
7日前
株式会社東芝
半導体装置
8日前
三菱電機株式会社
半導体装置
6日前
ヒロセ電機株式会社
同軸端子
6日前
日本航空電子工業株式会社
コネクタ
14日前
富士電機株式会社
炭化珪素半導体装置
15日前
日亜化学工業株式会社
発光装置
13日前
TDK株式会社
電子部品
12日前
日亜化学工業株式会社
発光装置
13日前
株式会社豊田自動織機
蓄電装置
15日前
TDK株式会社
電子部品
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ