TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023078276
公報種別
公開特許公報(A)
公開日
2023-06-06
出願番号
2023039758,2020137527
出願日
2023-03-14,2020-08-17
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20230530BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業者の負荷を低減する苗移植機1を提供すること。
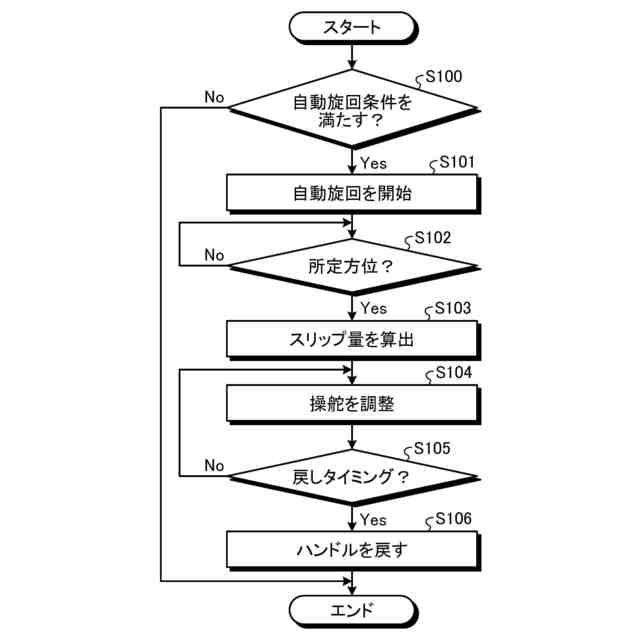
【解決手段】測位手段から受信する情報に基づいて走行車体の現在の位置情報を取得する位置情報取得装置を備え、制御装置は、車輪の回転数に基づいて算出された車速と、位置情報取得装置によって取得された情報に基づいて算出された前記走行車体の実車速とのずれに基づいて、スリップ量を算出し、前記走行車体が自動旋回をする場合には、所定の方位となるまでのスリップ量を算出し、前記スリップ量に基づいて、前記走行車体が次工程の直進走行経路に合うように前記モータを制御することでステアリング装置を制御し、前記スリップ量が増加するほど前記走行車体の旋回半径が大きくなるように、前記ステアリング装置を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
走行車体の操舵量を調整するステアリング装置と、
前記ステアリング装置を回動させるモータと、
前記モータを制御する制御装置と
を備え、
測位手段から受信する情報に基づいて前記走行車体の現在の位置情報を取得する位置情報取得装置
を備え、
前記制御装置は、
車輪の回転数に基づいて算出された車速と、前記位置情報取得装置によって取得された情報に基づいて算出された前記走行車体の実車速とのずれに基づいて、スリップ量を算出し、
前記走行車体が自動旋回をする場合には、所定の方位となるまでのスリップ量を算出し、前記スリップ量に基づいて、前記走行車体が次工程の直進走行経路に合うように前記モータを制御することで前記ステアリング装置を制御し、
前記スリップ量が増加するほど前記走行車体の旋回半径が大きくなるように、前記ステアリング装置を制御する
ことを特徴とする作業車両。
続きを表示(約 310 文字)
【請求項2】
前記制御装置は、
前記走行車体が自動直進している場合には、前記スリップ量が増加するほど前記ステアリング装置の操作を小さくする
ことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御装置は、
前記走行車体が自動直進している場合には、前記スリップ量を所定走行距離毎に算出する
ことを特徴とする請求項1または2に記載の作業車両。
【請求項4】
前記走行車体が自動旋回をする場合には、
旋回内側の車輪の回転数に基づいて前記スリップ量を算出する
ことを特徴とする請求項1~3のいずれか一つに記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、操作装置を直進位置に保持し、走行車体を自動直進走行させる作業車両が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-24541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、圃場を走行する場合には、圃場の状態によって走行車体の進行方向が変化するため、操舵量に対する実際の走行車体の進行方向にずれが生じるおそれがある。そのため、所望する進行方向と、実際の進行方向とにずれが生じるおそれがある。
【0005】
本発明は、上記に鑑みてなされたものであって、進行方向を安定させて走行可能な作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記した課題を解決し、目的を達成するために、実施形態の一態様に係る作業車両は、走行車体の操舵量を調整するステアリング装置と、前記ステアリング装置を回動させるモータと、前記モータを制御する制御装置とを備え、測位手段から受信する情報に基づいて前記走行車体の現在の位置情報を取得する位置情報取得装置を備え、前記制御装置は、車輪の回転数に基づいて算出された車速と、前記位置情報取得装置によって取得された情報に基づいて算出された前記走行車体の実車速とのずれに基づいて、スリップ量を算出し、
前記走行車体が自動旋回をする場合には、所定の方位となるまでのスリップ量を算出し、前記スリップ量に基づいて、前記走行車体が次工程の直進走行経路に合うように前記モータを制御することで前記ステアリング装置を制御し、前記スリップ量が増加するほど前記走行車体の旋回半径が大きくなるように、前記ステアリング装置を制御する。
【発明の効果】
【0007】
実施形態の一態様によれば、作業車両は、進行方向を安定させて走行することができる。
【図面の簡単な説明】
【0008】
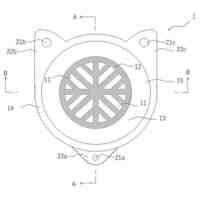
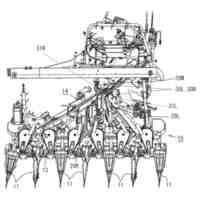
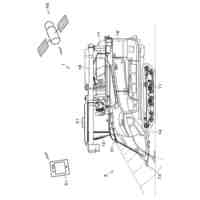
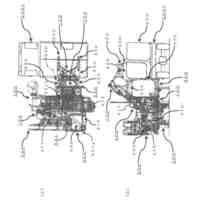
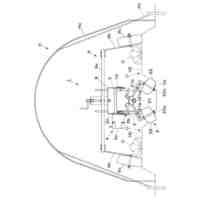
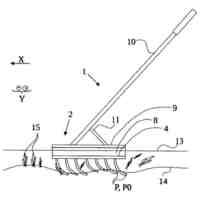
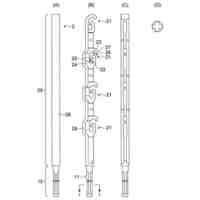
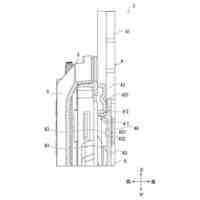
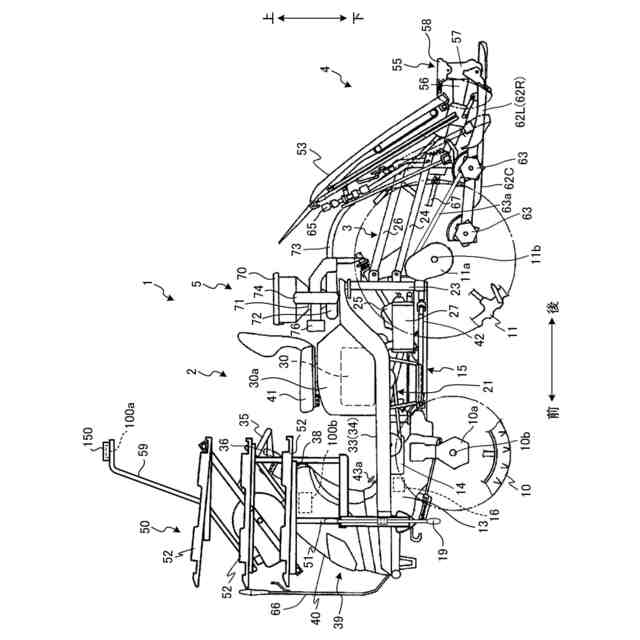
図1は、作業車両を示す側面図である。
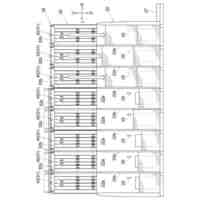
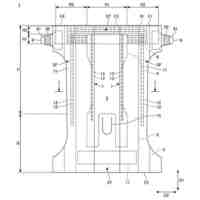
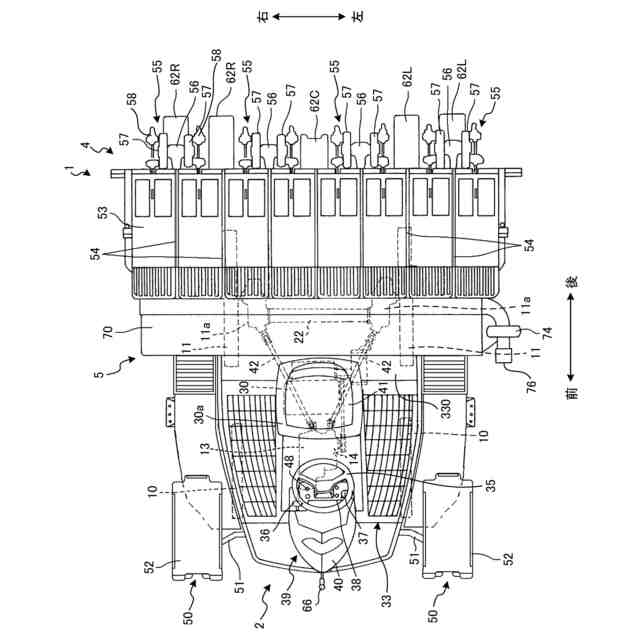
図2は、作業車両を示す平面図である。
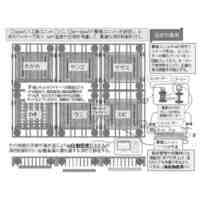
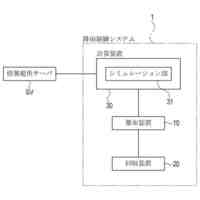
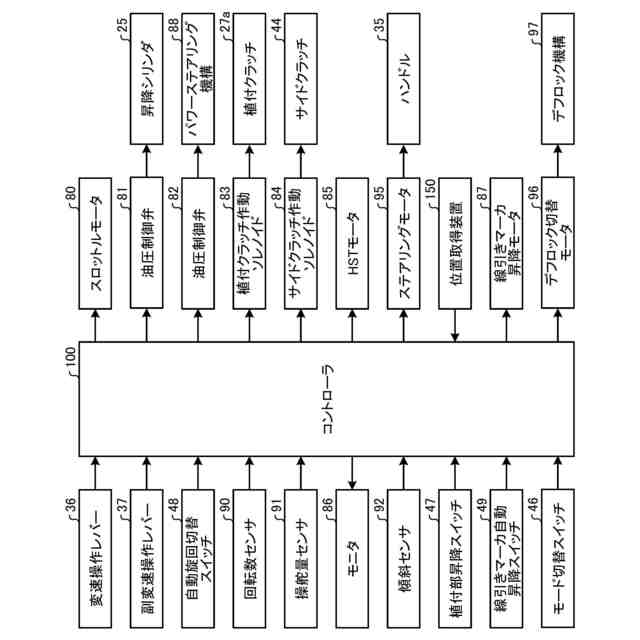
図3は、苗移植機の制御装置を中心とした制御系を示すブロック図である。
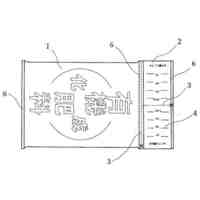
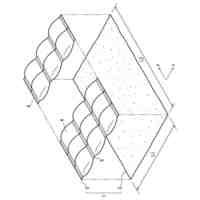
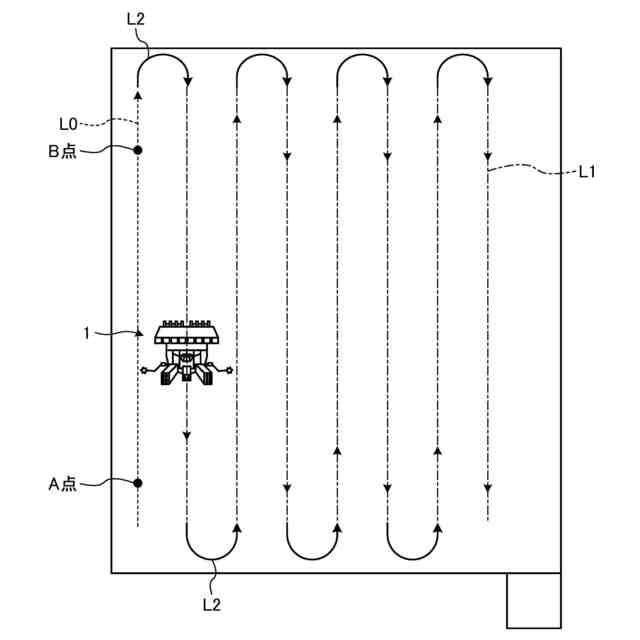
図4は、苗移植機の圃場における自律走行の説明図である。
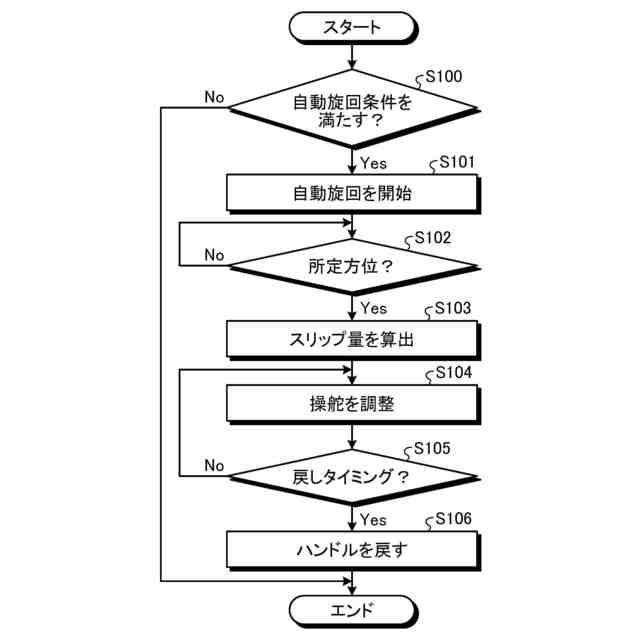
図5は、第1実施形態に係る自動旋回処理を説明するフローチャートである。
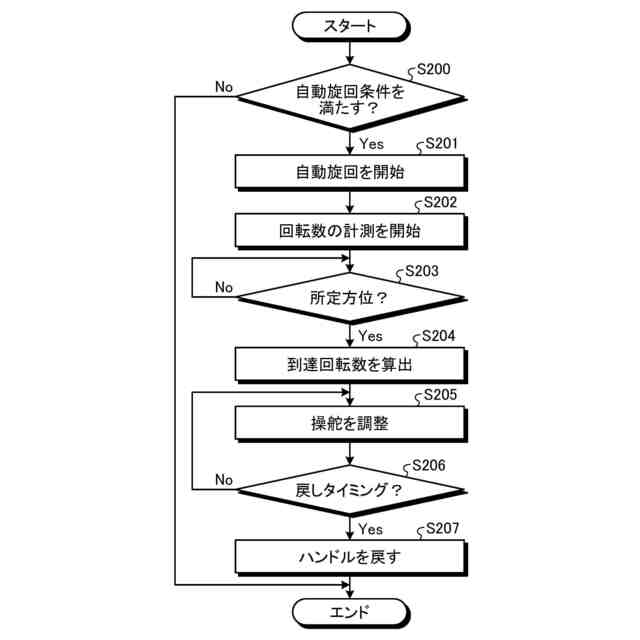
図6は、第2実施形態に係る自動旋回処理を説明するフローチャートである。
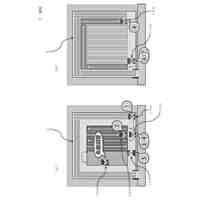
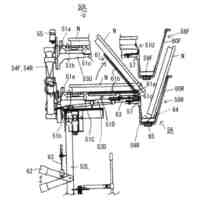
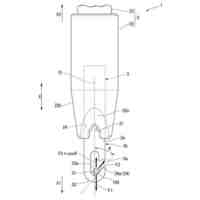
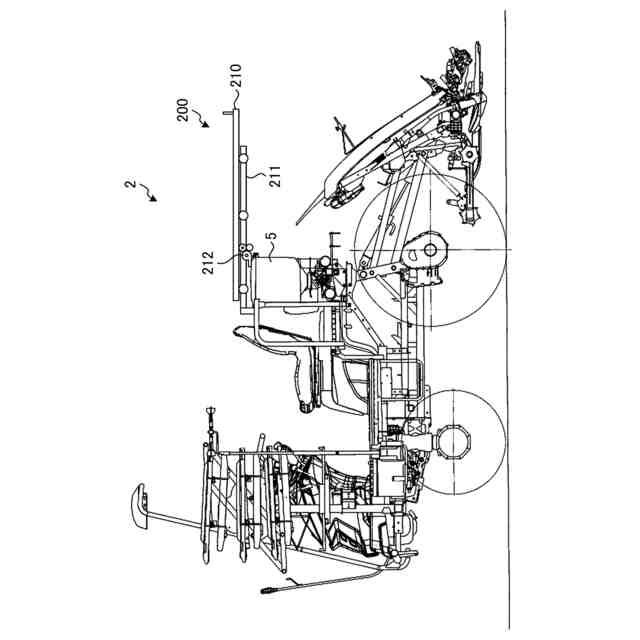
図7は、苗移植機の概略を示す側面図である。
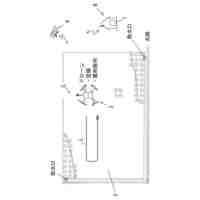
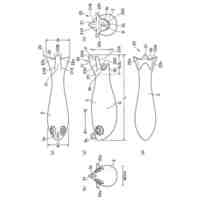
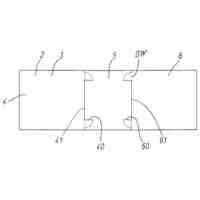
図8は、補助部材の変形例を示す図である。
【発明を実施するための形態】
【0009】
(第1実施形態)
<作業車両の概要>
まず、図1および図2を参照して第1実施形態に係る作業車両1の概要について説明する。図1は、作業車両1を示す側面図である。図2は、作業車両1を示す平面図である。
【0010】
なお、以下の説明では、前後方向とは、作業車両1の直進時における進行方向であり、進行方向の前方側を「前」、後方側を「後」と規定する。作業車両1の進行方向とは、直進時において、操縦席41からハンドル35(ステアリング装置)に向かう方向である(図1および図2参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
動物飼育用ケージ
6日前
個人
猫用のトイレ
6日前
個人
計量カップ付き肥料袋
19日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
15日前
個人
木造人工島の海産物農業
15日前
井関農機株式会社
収穫機
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
苗移植機
6日前
株式会社大垣化工
糸収容具
7日前
井関農機株式会社
作業車両
6日前
みのる産業株式会社
作業台車
8日前
ロンタイ株式会社
植生体
6日前
井関農機株式会社
乗用型苗植機
9日前
井関農機株式会社
防除システム
13日前
個人
水田用除草機器および水田用除草体
7日前
株式会社クボタ
田植機
6日前
有限会社伊藤テクノリサーチ
防草施工方法
今日
株式会社 ジークラック
ルアー
7日前
グローブライド株式会社
ルアー
16日前
有限会社シーム
横紐支持具
15日前
株式会社クボタ
降雨制御システム
7日前
アース製薬株式会社
線香
13日前
TEAM ONE株式会社
害虫捕獲用粘着テープ
14日前
個人
豚舎、およびそれを利用した養豚方法
7日前
鹿島建設株式会社
藻場の造成装置
6日前
株式会社シマノ
釣針外し器
13日前
大王製紙株式会社
ペット用の吸収性物品
15日前
三菱マヒンドラ農機株式会社
管理システム
13日前
井関農機株式会社
複数作業車の連携制御システム
今日
ヤンマーホールディングス株式会社
作業車両
14日前
アース製薬株式会社
薬剤揮散装置
13日前
ウェトラブホールディング株式会社
魚釣り用疑似餌
8日前
個人
伸縮する草刈り機パイプシャフトのアタッチメント。
16日前
新東工業株式会社
モニタリングシステム
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ