TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023073517
公報種別
公開特許公報(A)
公開日
2023-05-25
出願番号
2023060233,2021007118
出願日
2023-04-03,2021-01-20
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20230518BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 従来の田植え機などのような作業車両については、直進制御開始についての安全性や操作性が必ずしも十分でない。
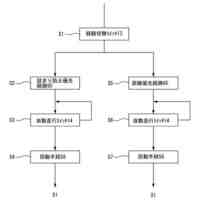
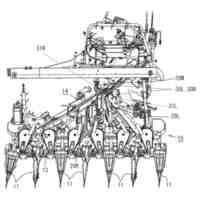
【解決手段】 車体へ取付けられた走行装置で走行しながら圃場で対地作業を行う作業車両であって、前記車体へ昇降可能に取付けられた対地作業装置と、前記車体を所定の直進向きに走行させるための直進制御を行うコントローラーと、を備え、前記車体の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあることを要求する車体向き条件と、前記対地作業装置が下降されていることを要求する対地作業装置下降条件を備え、 前記直進制御開始ユーザー指示があったとき、前記車体向き条件が満足されていないと判断した場合においては、前記コントローラーは前記直進制御を保留することを特徴とする。
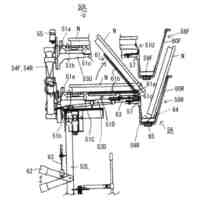
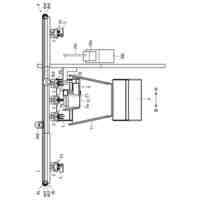
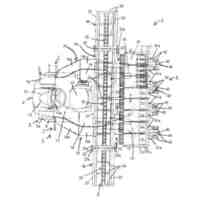
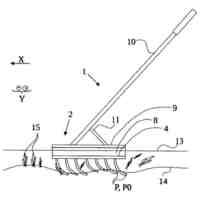
【選択図】 図2
特許請求の範囲
【請求項1】
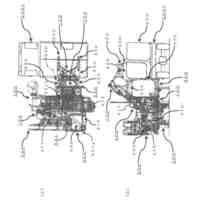
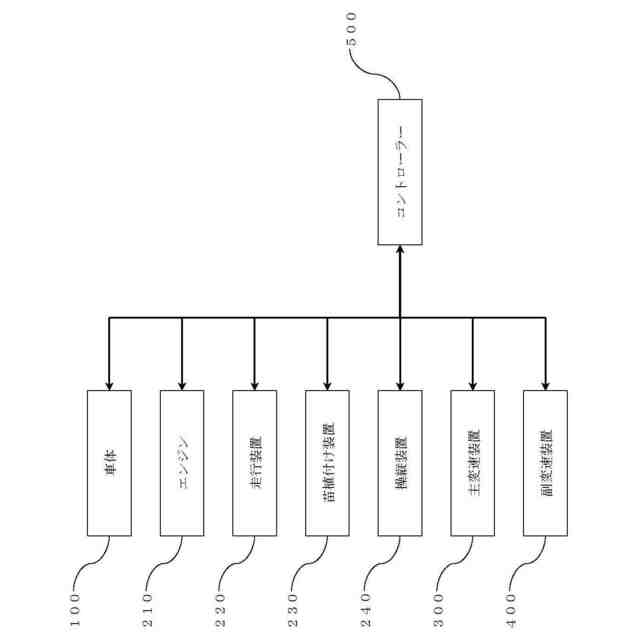
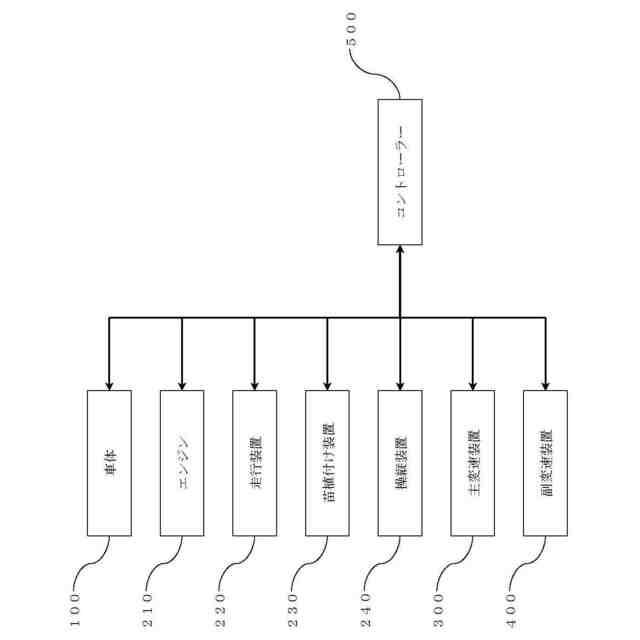
車体(100)へ取付けられた走行装置(220)で走行しながら圃場で対地作業を行う作業車両であって、
前記車体(100)へ昇降可能に取付けられた対地作業装置と、
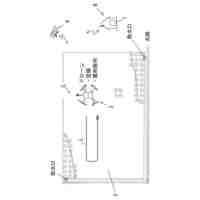
前記車体(100)を所定の直進向きに走行させるための直進制御を行うコントローラー(500)と、を備え、
前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあることを要求する車体向き条件と、
前記対地作業装置が下降されていることを要求する対地作業装置下降条件を備え、
前記直進制御開始ユーザー指示があったとき、前記車体向き条件が満足されていないと判断した場合においては、前記コントローラー(500)は前記直進制御を保留することを特徴とする作業車両。
続きを表示(約 420 文字)
【請求項2】
前記直進制御開始ユーザー指示があったとき、前記対地作業装置下降条件が満足されていないと判断した場合においては、前記コントローラー(500)は前記直進制御を保留することを特徴とする請求項1に記載の作業車両。
【請求項3】
前記車体向き条件と前記対地作業装置下降条件との内の少なくとも一方の条件が満足されたと判断すれば、前記保留された直進制御をさらなるユーザー指示なしに開始することを特徴とする請求項1または2のいずれかに記載の作業車両。
【請求項4】
前記直進制御開始ユーザー指示があったとき、前記車体向き条件と前記対地作業装置下降条件との両方の条件が満足されていないと判断した場合においては、前記コントローラー(500)は前記車体向き条件と前記対地作業装置下降条件との内の少なくとも一方の条件が満足されているか否かを再び判断することを特徴とする請求項1から3のいずれかに記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植え機などのような作業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
苗を植付ける、車体へ昇降可能に取付けられた苗植付け装置と、車体を所定の直進向きに走行させるための直進制御を行うコントローラーと、を有し、車体へ取付けられた走行装置で走行しながら苗を植付ける田植え機が、知られている(たとえば、特許文献1および2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-024541号公報
特許第5664634号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述された従来の田植え機などのような作業車両については、直進制御開始についての安全性や操作性が必ずしも十分でない。
【0005】
本発明は、上述された従来の課題を考慮し、直進制御開始についての安全性や操作性を向上することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、車体(100)へ取付けられた走行装置(220)で走行しながら圃場で対地作業を行う作業車両であって、
前記車体(100)へ昇降可能に取付けられた対地作業装置と、
前記車体(100)を所定の直進向きに走行させるための直進制御を行うコントローラー(500)と、を備え、
前記車体(100)の向きが前記直進向きを基準としてあらかじめ定められた範囲内にあることを要求する車体向き条件と、
前記対地作業装置が下降されていることを要求する対地作業装置下降条件を備え、
前記直進制御開始ユーザー指示があったとき、前記車体向き条件が満足されていないと判断した場合においては、前記コントローラー(500)は前記直進制御を保留することを特徴とする作業車両である。
【0007】
第2の本発明は、前記直進制御開始ユーザー指示があったとき、前記対地作業装置下降条件が満足されていないと判断した場合においては、前記コントローラー(500)は前記直進制御を保留することを特徴とする請求項1に記載の作業車両である。
【0008】
第3の本発明は、前記車体向き条件と前記対地作業装置下降条件との内の少なくとも一方の条件が満足されたと判断すれば、前記保留された直進制御をさらなるユーザー指示なしに開始することを特徴とする請求項1または2に記載の作業車両である。
【0009】
第4の本発明は、前記直進制御開始ユーザー指示があったとき、前記車体向き条件と前記対地作業装置下降条件との両方の条件が満足されていないと判断した場合においては、前記コントローラー(500)は前記車体向き条件と前記対地作業装置下降条件との内の少なくとも一方の条件が満足されているか否かを再び判断することを特徴とする請求項1から3のいずれかに記載の作業車両である。
【発明の効果】
【0010】
第1の本発明により、直進制御開始についての安全性を簡素な構成で向上することが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
苗移植機
2日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
乗用型苗植機
5日前
井関農機株式会社
防除システム
9日前
井関農機株式会社
穀稈の刈取作業方法
8日前
井関農機株式会社
コンバイン
9日前
個人
魚釣用ルアー
17日前
個人
動物飼育用ケージ
2日前
個人
猫用のトイレ
2日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
11日前
個人
計量カップ付き肥料袋
15日前
個人
イカが傘針を開く餌木
24日前
個人
木造人工島の海産物農業
11日前
井関農機株式会社
収穫機
12日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
10日前
株式会社大垣化工
糸収容具
3日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
22日前
井関農機株式会社
苗移植機
2日前
みのる産業株式会社
作業台車
4日前
日東電工株式会社
水槽
18日前
井関農機株式会社
台木切断装置
15日前
井関農機株式会社
防除システム
9日前
ロンタイ株式会社
植生体
2日前
カゴメ株式会社
トマト種子の製造方法
18日前
井関農機株式会社
乗用型苗植機
5日前
積水樹脂株式会社
トンネル栽培用支柱
24日前
井関農機株式会社
乗用型苗植機
23日前
個人
水田用除草機器および水田用除草体
3日前
井関農機株式会社
乗用型苗移植機
23日前
井関農機株式会社
農作業機用台車
18日前
株式会社クボタ
田植機
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ