TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2023056986
公報種別
公開特許公報(A)
公開日
2023-04-20
出願番号
2021166541
出願日
2021-10-10
発明の名称
省エネルギー減速走行制御方法
出願人
個人
代理人
主分類
B60W
30/00 20060101AFI20230413BHJP(車両一般)
要約
【課題】交差点等の減速・停止目標地点への惰性走行主体の減速・制動走行を、車両状態・道路状態・交通状態等に最適に適合した形態で実行する。
【解決手段】交差点等の減速・停止目標地点への惰性走行主体の減速・制動走行を、車両の減速走行開始時の走行速度に対応した前記減速・停止目標地点上流惰性走行可能距離範囲内の車両の有する運動エネルギー利用効率に対応した複数の惰性走行形態(惰性走行開始点―惰性走行終了点(制動走行開始点))中から走行中の車両状態・道路状態・交通状況に最適に対応した一形態を選定して、惰性走行主体(惰性走行+制動走行)で行う
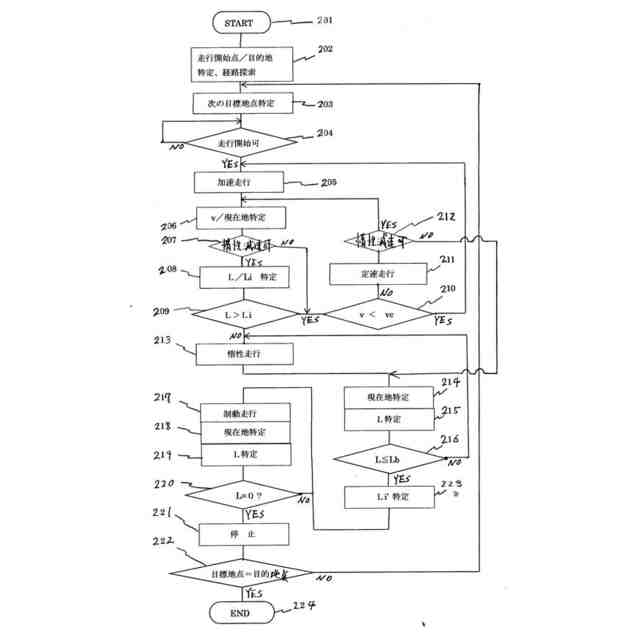
【選択図】 図1
特許請求の範囲
【請求項1】
交差点等の減速・停止目標地点への減速・制動走行を、車両の減速走行開始時の走行速度に対応した前記減速・停止目標地点上流惰性走行可能距離範囲内の車両の有する運動エネルギー利用効率に対応した複数の惰性走行形態(惰性走行開始点-惰性走行終了点)中から走行中の車両状態・道路状態・交通状況に最適に対応した一形態を選定して行うこと、を特徴とする省エネルギー減速走行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本願発明は、走行中の車両の有する運動エネルギーを、当該車両の走行環境・交通環境に適合したかたちで個々の交差点等の目標減速・停止地点に向けての惰性走行主体の減速走行に活用する、省エネルギー減速走行制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
走行中の車両の有している運動エネルギーの有効活用方法として、回生協調制動がある。
これは減速時車両の有している運動エネルギーを回生して減速後の車両走行エネルギーとして利用するものである。
しかしこの制動方法においては、
・モータ駆動用バッテリーが満充電時にはエネルギー回生が不可能となる。
・制動力としては、運動エネルギー回生による制動力は不足となることから摩擦(油圧)制動と併用する、即ち回生協調制動とする、必要があり、このため、運動エネルギー回生効率が低下する。
・市街地走行時等頻繁に回生(協調)制動を繰り返すことが、バッテリーの寿命劣化につながる。
等の大きな問題がある。
【先行技術文献】
【特許文献】
【0003】
特開2011-046272
特開2030-034734
特開2017-124806
【発明の概要】
【発明が解決しようとする課題】
【0004】
本願発明は、走行中の車両の有している運動エネルギーを利用しての回生協調制動走行に際しての
・運動エネルギー利用効率の低さ
・バッテリーの充放電頻度過大によるバッテリー寿命の低下
の問題を解決することに加えて、惰性走行主体の減速走行によって運動エネルギーのさらなる効率的かつ効果的な活用による減速走行方法を提供しようとするものである。
【課題を解決するための手段】
【0005】
回生協調制動での運動エネルギーの蓄積およびその後の車両走行において前記蓄積されたエネルギーをその後の車両駆動に活かす回生協調制動の代わりに、減速時、車両の有している運動エネルギーを直接的に車両駆動(減速走行)に活かす、即ち運動エネルギーを惰性走行主体の減速走行できるに直接利用することによって運動エネルギーの利用効率をあげる方法がある(特許文献1、特許文献2)。
この結果、従来の回生協調制動では、せいぜい40%程度の運動エネルギー利用効率を、惰性走行の活用によって最大100%近いエネルギー利用効率とすることができる。
【0006】
ここで惰性走行とは、車両の駆動源(エンジン、モータ等)の動作停止あるいは駆動源と駆動輪間の接続を遮断あるいは疎とする、ことによって、車両の減速走行駆動を車両の有している運動エネルギーで行う走行を云う。
また、惰性走行可能距離とは通常走行状態から惰性走行状態に移行した場合の、車両の走行抵抗(あるいは惰性走行減速度)によって定まる、車両停止までの減速(惰性)走行可能な最大走行距離を云う。
【0007】
但し、この惰性走行による運動エネルギー利用には大きな問題がある。
それは惰性走行時の減速度が(回生協調制動に比べて)小さいことから、減速に要する時間が長時間、従って減速走行距離が長距離となり、この減速走行の間の車両平均速度が低下する、という問題である。
しかしこの問題は、運動エネルギーの利用効率を許容範囲内で下げることによって、例えば運動エネルギー利用効率を100%から70%程度に下げることによって、減速走行距離を運動エネルギー利用効率100%時に対して約50%と短縮することができる。この結果減速走行時の平均速度は減速走行開始時の速度の75%に(従って平均速度低下を25%に)抑えることができる。
【0008】
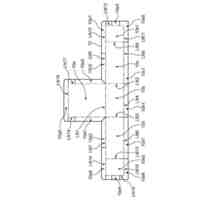
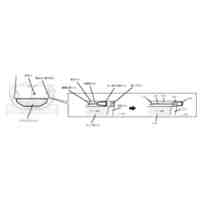
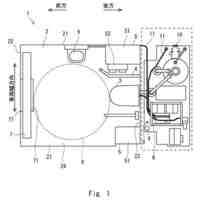
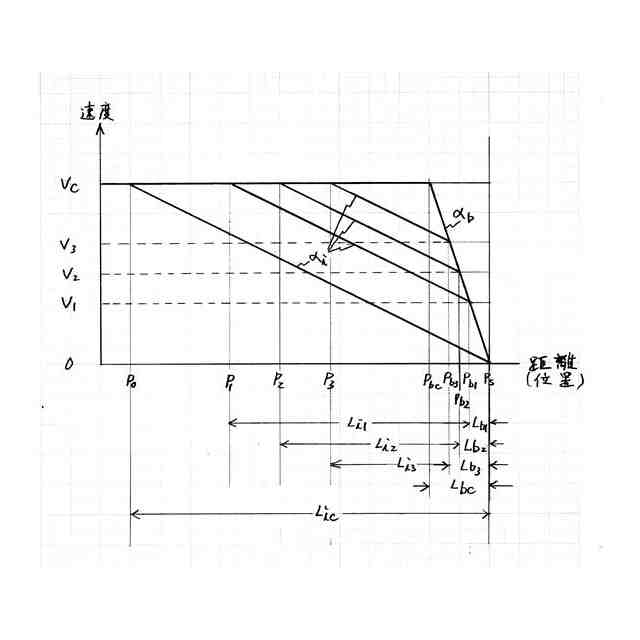
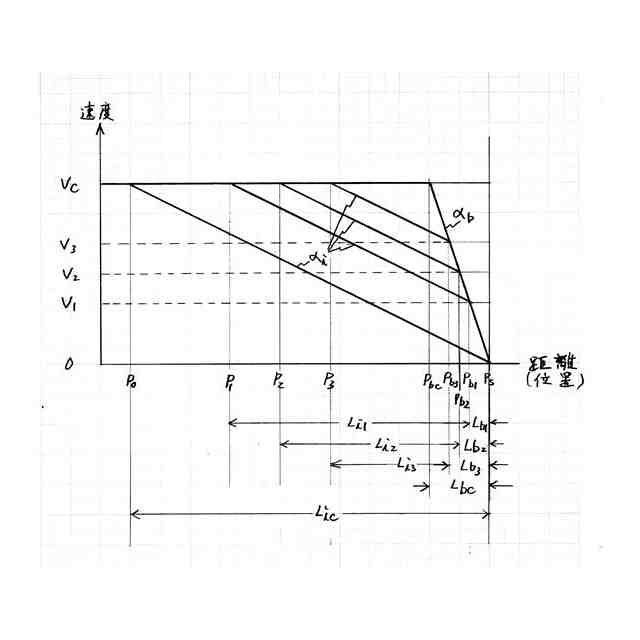
以下に上記惰性走行による運動エネルギー利用効果を、惰性走行距離の変化を中心に、図1を用いて説明する。
図1において
・地点P0は走行速度vcで走行中の車両の惰性走行(惰性走行減速度αi(vc))開始地点、
・地点Psは車両の目標停止地点、
・地点P1 は速度v1で惰性走行から制動走行に移行するための惰性走行(惰性走行減速度αi(vc))開始点、
・地点Pbcは速度vcで走行中の車両が地点Eで停止するための制動走行(制動減速度:αb)開始地点、
・地点Pb1は、地点P1からの惰性走行を終了して制動走行(制動減速度:αb)に移行する地点、
である。
【0009】
先ず、速度vcで走行中の車両の有する運動エネルギーEvcは(数1)で
(数1)
Evc=(m・vc
2
)/2
また、速度vcから速度v1までの間、惰性走行を行うと運動エネルギーの惰性走行への利用効率ηは(数2)で、
(数2)
η=(vc
2
-v1
2
)/vc
2
惰性走行速度範囲vc ~ v1間の平均惰性走行速度vc1は(数3)で、
各々あらわすことができる。
(数3)
vc1≒(vc+v1)/2
【0010】
即ち、走行中の車両の有する運動エネルギーの惰性走行への利用効率ηを、許容できる範囲(例えば、回生制動での運動エネルギー回生効率を上回る範囲内)で軽減、即ち惰性走行開始速度vcと惰性走行終了速度(制動走行開始速度)v1の比(v1/vc)を最適設定することによって、このη軽減効果を惰性走行距離短縮効果に供することができることがわかる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スーパーEV
1か月前
個人
骨組み型熱交換器
今日
個人
自動車暴走抑制装置
7日前
東レ株式会社
フロントグリル
7日前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
1か月前
オクト産業株式会社
自動車
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社SUBARU
車両
17日前
株式会社SUBARU
車両
17日前
株式会社SUBARU
車両
17日前
トヨタ自動車株式会社
車両
27日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
23日前
カヤバ株式会社
シリンダ装置
17日前
新明和工業株式会社
作業車両
1か月前
新明和工業株式会社
荷箱の天蓋装置
14日前
ダイハツ工業株式会社
搬送装置
2日前
オムロン株式会社
表示システム
今日
デルタ工業株式会社
シート
8日前
ダイハツ工業株式会社
ブラケット
今日
株式会社アイシン
給気装置
7日前
ミック電子工業株式会社
給電レール
22日前
株式会社岡田製作所
ラゲッジネット
17日前
株式会社カーメイト
キャリア
1か月前
株式会社クボタ
作業車
16日前
株式会社SUBARU
車両用シート
9日前
株式会社クボタ
作業車
20日前
株式会社SUBARU
乗員保護装置
1か月前
株式会社小糸製作所
音発生ユニット
1か月前
株式会社SUBARU
衝突検知装置
9日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
20日前
トヨタ自動車株式会社
トイレ付き車両
14日前
日立建機株式会社
電動車両
14日前
東海興業株式会社
ウェザーストリップ
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ