TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024063374
公報種別
公開特許公報(A)
公開日
2024-05-13
出願番号
2022171266
出願日
2022-10-26
発明の名称
管制装置、管制システム、管制方法および管制プログラム
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20240502BHJP(信号)
要約
【課題】事前に退避場所の状況を把握できると共に、車両または路側機の異常によって停止が必要となった場合に適切な指示を行う管制装置を提供する。
【解決手段】管制装置100は、車両情報受信部301と、路側機情報受信部302と、車両情報、地図情報および車両の運行情報に基づいて走行予定経路を生成する経路生成部307と、走行予定経路、地図情報および障害物情報に基づいて退避場所を検出する退避場所検出部308と、車両情報に含まれる車両の異常判定結果、路側機情報に含まれる路側機の異常判定結果および障害物情報に基づいて停止要否を判定する停止要否判定部309と、管制指示決定部310と、管制指示送信部311とを備えている。
【選択図】図5
特許請求の範囲
【請求項1】
車両から送信される障害物情報、前記車両の異常判定結果および自車位置情報を含む車両情報を受信する車両情報受信部と、
路側機から送信される障害物情報、前記路側機の異常判定結果および設置位置情報を含む路側機情報を受信する路側機情報受信部と、
前記車両情報、交差点周辺の地図情報および前記車両の運行情報に基づいて前記車両の走行予定経路を生成する経路生成部と、
前記車両情報および前記路側機情報に含まれる前記障害物情報、前記走行予定経路、並びに前記地図情報に基づいて前記車両が退避可能な退避場所を検出する退避場所検出部と、
前記車両情報および前記路側機情報に含まれる前記障害物情報、前記車両情報に含まれる前記自車位置情報および前記車両の異常判定結果、並びに前記路側機情報に含まれる前記路側機の異常判定結果に基づいて前記退避場所での前記車両の停止要因および停止要否を判定する停止要否判定部と、
前記地図情報、前記退避場所の検出結果および前記停止要否の判定結果に基づいて管制指示を決定する管制指示決定部と、
前記管制指示を前記車両に送信する管制指示送信部とを備えたことを特徴とする管制装置。
続きを表示(約 1,500 文字)
【請求項2】
前記退避場所検出部は、前記地図情報に基づいて前記走行予定経路上または前記走行予定経路に隣接した退避場所のうち、前記車両の現在位置から退避場所までの走行予定距離が最も短い退避場所を選択すると共に、前記車両の現在位置から選択した前記退避場所までの走行予定経路上および選択した前記退避場所に障害物が存在するか否かを判定することで前記退避場所を確保できたか否かを検出することを特徴とする請求項1に記載の管制装置。
【請求項3】
前記停止要否判定部は、前記車両情報に含まれる前記自車位置情報と、前記車両情報および前記路側機情報に含まれる前記障害物情報とに基づいて前記車両と障害物との衝突が予測されるか否かを判定すると共に、前記車両情報に含まれる前記車両の異常判定結果と、前記路側機情報に含まれる前記路側機の異常判定結果とに基づいて前記車両の停止要否を判定することを特徴とする請求項1または2に記載の管制装置。
【請求項4】
前記管制指示決定部は、前記停止要否の判定結果から停止が必要と判定された場合、前記地図情報と前記車両情報とに基づいて、前記車両が前記交差点内のコンフリクトエリア内に存在するか否かを判定することを特徴とする請求項1または2に記載の管制装置。
【請求項5】
前記管制指示は、前記車両に対して直ちに停止を要求する緊急停止指示、前記退避場所まで移動した後に前記退避場所で停止することを要求する退避場所停止指示、走行を継続することを要求する走行継続指示、および減速させて走行を継続することを要求する低速走行継続指示のいずれかであることを特徴とする請求項1または2に記載の管制装置。
【請求項6】
前記管制指示決定部は、前記停止要否の判定結果から停止が必要と判定されかつ前記車両が前記交差点内のコンフリクトエリア内に存在しないと判定された場合は、前記管制指示を前記緊急停止指示とすることを特徴とする請求項5に記載の管制装置。
【請求項7】
前記管制指示決定部は、前記停止要否の判定結果から停止が必要と判定されかつ前記車両が前記交差点内のコンフリクトエリア内に存在すると判定された場合において、前記停止要因が衝突予測の場合は、前記管制指示を前記緊急停止指示とすることを特徴とする請求項5に記載の管制装置。
【請求項8】
前記管制指示決定部は、前記停止要否の判定結果から停止が必要と判定されかつ前記車両が前記交差点内のコンフリクトエリア内に存在すると判定された場合において、前記退避場所検出部において前記退避場所が確保できていない場合は、前記管制指示を前記低速走行継続指示とすることを特徴とする請求項5に記載の管制装置。
【請求項9】
前記管制指示決定部は、前記停止要否の判定結果から停止が必要と判定されかつ前記車両が前記交差点内のコンフリクトエリア内に存在すると判定された場合において、前記退避場所検出部において前記退避場所が確保できておりかつ前記停止要因が前記路側機の異常または前記車両の異常である場合は、前記管制指示を前記退避場所停止指示とすることを特徴とする請求項5に記載の管制装置。
【請求項10】
前記管制指示決定部は、前記停止要否の判定結果から停止が必要と判定されかつ前記車両が前記交差点内のコンフリクトエリア内に存在すると判定された場合において、前記退避場所検出部において前記退避場所を確保できておりかつ前記停止要因が前記路側機の異常でもなく前記車両の異常でもない場合は、前記管制指示を前記走行継続指示とすることを特徴とする請求項5に記載の管制装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、管制装置、管制システム、管制方法および管制プログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近年、自動車の自動運転技術の開発が盛んに行われており、車両に搭載されたセンサを用いて検出した障害物情報と、車両に搭載されたGPS(Global Positioning System)および地図の情報から求めた自車位置情報とに基づいて障害物との衝突を回避して自動運転を行う技術が提案されている。さらに、路側帯などに設置されたRSU(Road Side Unit)とも呼ばれる路側機と自動運転車両との間で通信を行う管制装置が提案されている。この管制装置においては、路側機に設置されたセンサが障害物を検出したときに、検出した障害物情報を自動運転車両に送信することで自動運転車両と障害物との衝突を回避することができる。
【0003】
自動運転車両と路側機との間で通信を行う管制装置においては、交差点内の交通を円滑にする必要がある。交差点内において、管制装置が自動運転車両に対して不用意に緊急停止指示を送ると、他車両の走行を妨げるおそれがある。交通を円滑にするための従来の管制装置として、事前に自動運転車両が停止する可能性のある退避場所を設定し、管制装置と自動運転車両との間の通信が途絶したときは通信が途絶する前に取得しておいた退避場所まで自動運転車両の走行を継続させる制御方法が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2016-181140号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の管制装置においては、事前に退避場所の状況を把握することができないという問題があった。また、自動運転車両の異常または路側機の異常によって停止が必要となった場合に自動運転車両に適切な指示を行うことができないという問題があった。
【0006】
本願は、上述の課題を解決するためになされたもので、事前に退避場所の状況を把握できると共に、自動運転車両の異常または路側機の異常によって停止が必要となった場合に自動運転車両に適切な指示を行うことができる管制装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本願の管制装置は、車両から送信される障害物情報、車両の異常判定結果および自車位置情報を含む車両情報を受信する車両情報受信部と、路側機から送信される障害物情報、路側機の異常判定結果および設置位置情報を含む路側機情報を受信する路側機情報受信部と、車両情報、交差点周辺の地図情報および車両の運行情報に基づいて車両の走行予定経路を生成する経路生成部と、車両情報および路側機情報に含まれる障害物情報、走行予定経路、並びに地図情報に基づいて車両が退避可能な退避場所を検出する退避場所検出部と、車両情報および路側機情報に含まれる障害物情報、車両情報に含まれる自車位置情報および車両の異常判定結果、並びに路側機情報に含まれる路側機の異常判定結果に基づいて退避場所での車両の停止要因および停止要否を判定する停止要否判定部と、地図情報、退避場所の検出結果および停止要否の判定結果に基づいて管制指示を決定する管制指示決定部と、管制指示を車両に送信する管制指示送信部とを備えている。
【発明の効果】
【0008】
本願の管制装置は、車両情報および路側機情報に含まれる障害物情報、車両情報に含まれる自車位置情報および車両の異常判定結果、並びに路側機情報に含まれる路側機の異常判定結果に基づいて退避場所での車両の停止要因および停止要否を判定する停止要否判定部を備えているので、事前に退避場所の状況を把握できると共に、自動運転車両の異常または路側機の異常によって停止が必要となった場合に自動運転車両に適切な指示を行うことができる。
【図面の簡単な説明】
【0009】
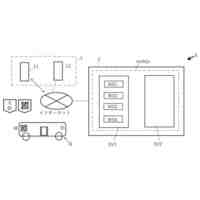
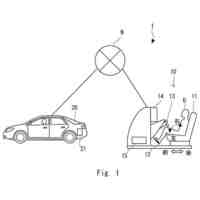
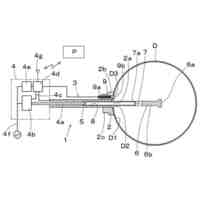
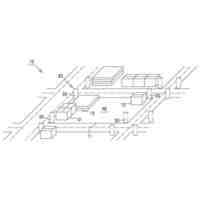
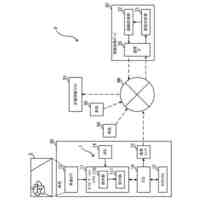
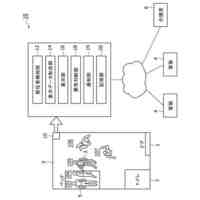
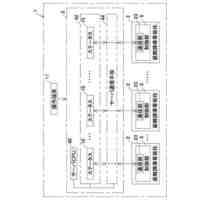
実施の形態1に係る管制システムを説明する図である。
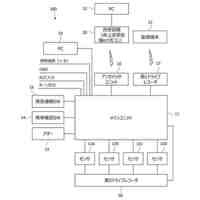
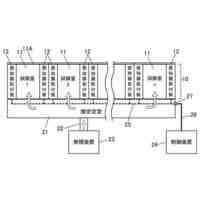
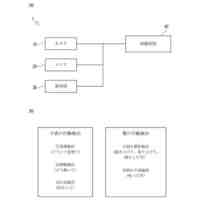
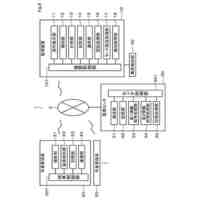
実施の形態1に係る管制システムのハードウェアの構成を示す図である。
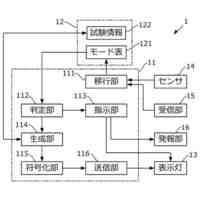
実施の形態1に係る自動運転車両の機能を示すブロック図である。
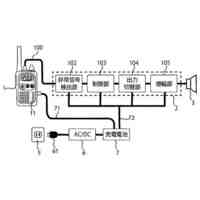
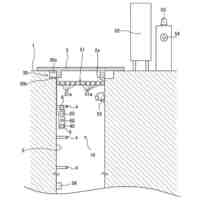
実施の形態1に係る路側機の機能を示すブロック図である。
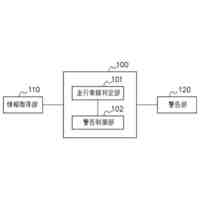
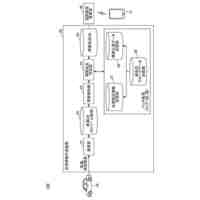
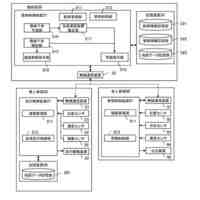
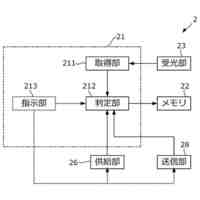
実施の形態1に係る管制装置の機能を示すブロック図である。
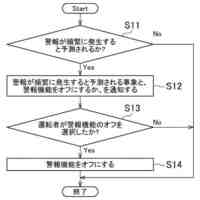
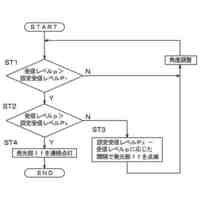
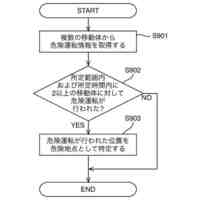
実施の形態1に係る管制装置の動作を示すフローチャートである。
実施の形態1における退避場所の検出処理を示すフローチャートである。
実施の形態1における退避場所での停止要否および停止要因の判定処理を示すフローチャートである。
実施の形態1における衝突予測処理を示すフローチャートである。
実施の形態1における管制指示決定処理を示すフローチャートである。
実施の形態2に係る管制システムを説明する図である。
実施の形態2に係る管制システムのハードウェアの構成を示す図である。
実施の形態2に係る自動運転車両の機能を示すブロック図である。
実施の形態2に係る管制装置の動作を示すフローチャートである。
実施の形態2における退避場所での停止要否および停止要因の判定処理を示すフローチャートである。
実施の形態2における管制指示決定処理を示すフローチャートである。
実施の形態3に係る管制システムを説明する図である。
実施の形態3に係る管制システムのハードウェアの構成を示す図である。
実施の形態3に係る管制装置の機能を示すブロック図である。
実施の形態3に係る管制装置の動作を示すフローチャートである。
実施の形態3における退避場所での停止要否および停止要因の判定処理を示すフローチャートである。
実施の形態3における管制指示決定処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本願を実施するための実施の形態に係る管制装置および管制システムについて、図面を参照して詳細に説明する。なお、各図において同一符号は同一もしくは相当部分を示している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非常放送システム
29日前
個人
バス送迎支援システム
1か月前
スズキ株式会社
車線案内装置
14日前
株式会社ユピテル
システム等
7日前
スズキ株式会社
運転支援装置
今日
能美防災株式会社
表示灯
1か月前
トヨタ自動車株式会社
遠隔操作装置
1日前
トヨタ自動車株式会社
制御装置
23日前
株式会社アガタ
閉空間監視装置
1か月前
ニッタン株式会社
感度試験装置
1か月前
株式会社京三製作所
車両検出装置
1か月前
株式会社デンソーウェーブ
監視システム
7日前
能美防災株式会社
火災感知器
11日前
トヨタ自動車株式会社
情報収集システム
1か月前
ユニット株式会社
人感センサー音声警報器
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
株式会社デンソー
報知装置
7日前
能美防災株式会社
感知器
1か月前
トヨタ自動車株式会社
渋滞情報作成装置
1か月前
株式会社アサヒ電子研究所
居住者監視システム
1か月前
株式会社JR西日本テクシア
OD記録システム
17日前
大和ハウス工業株式会社
見守りシステム
1か月前
日立建機株式会社
車両管理システム
1か月前
能美防災株式会社
試験器
1か月前
表示灯株式会社
災害警報システム
29日前
パイオニア株式会社
情報処理装置
1日前
能美防災株式会社
試験器
14日前
鹿島建設株式会社
警告装置
1か月前
トヨタ自動車株式会社
運転支援装置
17日前
能美防災株式会社
差動式分布型感知器
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社日惠製作所
侵入感知警報システム
4日前
トヨタ自動車株式会社
車載装置
11日前
ヤマハ発動機株式会社
航行制御システムおよび船舶
9日前
株式会社LIXIL
閉込警告システム
1か月前
株式会社デンソーウェーブ
警備システム
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ